Đồ họa của Tech Insider cho thấy những lục địa sẽ hợp nhất thành một dải đất duy nhất trong vòng 250 triệu năm tới . Bạn đang đọc: Các...
bài tập đại số tuyến tính tập 2 đại học KHTN – Tài liệu text
bài tập đại số tuyến tính tập 2 đại học KHTN
Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây (203.58 KB, 19 trang )
Chương 1
Không gian vectơ
1.1
Không gian con
Phương pháp xác định không gian con
Để xác định tập hợp con W có là không gian con của không gian vectơ
V hay không, ta thực hiện như sau:
• Bước 1: Xét xem vectơ 0 có thuộc W hay không? Nếu 0 ∈
/ W thì W
không phải là không gian con của V. Ngược lại, ta tiến hành bước 2.
• Bước 2: Lấy u, v ∈ W. Từ đó dựa vào tính chất của W để suy ra tính
chất của u, v. Sau đó kiểm tra u + v và λu(λ ∈ R) có thỏa tính chất của
W hay không. Nếu u + v và λu thỏa tính chất của W thì ta kết luận W
là không gian con của V. Ngược lại, ta cần chỉ ra một ví dụ cụ thể của
u, v ∈ W sao cho u + v ∈
/ W hay một ví dụ cụ thể của u ∈ W, λ ∈ R
sao cho λu ∈
/ W.
Ví dụ 1.1. Kiểm tra tập hợp W = {(x, y, z) ∈ R3 |x = y + z} có là không
gian con của không gian R3 hay không?
Giải.
• Vì (0, 0, 0) ∈ W nên W = ∅.
• Lấy u = (x1, y1, z1 ), v = (x2, y2, z2 ) ∈ W. Ta có: x1 = y1 + z1 và
x2 = y2 + z2. Vì u + v = (x1 + x2, y1 + y2, z1 + z2 ) và x1 + x2 =
(y1 + z1 ) + (y2 + z2 ) = (y1 + y2 ) + (z1 + z2 ) nên u + v ∈ W .
1
• Với λ ∈ R, ta có λu = (λx1, λy1, λz1 ) và λx1 = λ(y1 + z1 ) = λy1 + λz1
nên λu ∈ W .
Vậy W là không gian con của R3 .
Ví dụ 1.2. Kiểm tra tập hợp W = {(x, y, z) ∈ R3 |x + y + z = 1} có là không
gian con của không gian R3 hay không?
Giải. Vì (0, 0, 0) ∈
/ W nên W không phải là không gian con của R3 .
Ví dụ 1.3. Kiểm tra tập hợp W = {(x, y, z ∈ R3 |xy = z)} có là không gian
con của không gian R3 hay không?
Giải. Chọn u = (1, 1, 1) ∈ W và λ = 2. Khi đó λu = 2u = (2, 2, 2) ∈
/ W.
Suy ra W không phải là không gian con của R3 .
Bài tập
Bài 1. Trong các tập hợp W sau đây thì tập hợp nào là không gian con của
không gian R3 ?
a) W = {(x1, x2, x3 )|x1 ≥ 0}
b) W = {(x1, x2, x3 )|x1 + 2×2 = 3×3 }
c) W = {(x1, x2, x3 )|x1 + 3×2 = 1}
d) W = {(x1, x2, x3 )|x1 = x2 = x3 }
e) W = {(x1, x2, x3 )|x21 = x2 x3 }
f) W = {(x1, x2, x3 )|x1 x2 = 0}
g. W = {(a, 0, 2a)|a ∈ R}.
h. W = {(a, −b, b + 1)|a, b ∈ R}.
i. W = {(a − b, a, a + b)|a, b ∈ R}.
j. W = {(a, b, 0)|a, b ∈ R}.
2
1.2
Độc lập tuyến tính hay phụ thuộc tuyến
tính
Định lý 1.4. Cho u1 ,. .., um ∈Rn
. Hệ vectơ {u1 ,. .., um } độc lập tuyến tính
u1
u2
nếu và chỉ nếu hạng của A = .. bằng m.
.
un
Hệ quả 1.5. Cho u1 ,. .., um ∈ Rn
. Hệvectơ {u1 ,. .., um } phụ thuộc tuyến
u1
u2
tính nếu và chỉ nếu hạng của A = .. khác m.
.
un
u1
u2
Chú ý 1.6. Trong trường hợp m = n, đặt A = .. .
.
un
• Hệ vectơ {u1 ,. .., un } độc lập tuyến tính nếu và chỉ nếu det(A) = 0.
• Hệ vectơ {u1 ,. .., un } phụ thuộc tuyến tính nếu và chỉ nếu det(A) = 0.
Ví dụ 1.7. Xác định tập hợp các vectơ u1 = (1, 2, 3, 1), u2 = (1, 1, 2, 3), u3
(1, 3, 1, 2) là độc lập tuyến tính hay phụ thuộc tuyến tính?
1 2 3 1
1 2
3 1
1
d2 →d2 −d1
d3 →d3 +d2
Giải. A = 1 1 2 3 −−
−−−−→ 0 −1 −1 2 −−
−−−−→ 0
d3 →d3 −d1
1 3 1 2
0 1 −2 1
0
Do đó r(A) = 3. Suy ra {u1, u2, u3 } độc lập tuyến tính.
=
2
3 1
−1 −1 2 .
0 −3 3
Ví dụ 1.8. Xác định tập hợp các vectơ u1 = (1, 1, 1), u2 = (1, −2, 1), u3 =
(−1, 2, −1) là độc lập tuyến tính hay phụ thuộc tuyến tính.
1
1
1
Giải. Xét A = 1 −2 1 . Vì det(A) = 0 nên hệ các vectơ
−1 2 −1
{u1, u2, u3 } phụ thuộc tuyến tính.
3
Ví dụ 1.9. Cho các vectơ v1 = (2, 1, 1, 1); v2 = (2, 1, −1, 1); v3 = (0, 0, 0, m).
a. Tìm m để v1, v2, v3 độc lập tuyến tính.
b. Tìm m để v1, v2, v3 phụ thuộc tuyến tính.
2 1 1 1
2 1 1 1
d2 →d2 −d1
Giải. A = 2 1 −1 1 −−
−−−−→ 0 0 −2 0
0 0 0 m
0 0 0 m
a. v1, v2, v3 độc lập tuyến tính khi và chỉ khi r(A) = 3 khi và chỉ khi
m = 0.
b. v1, v2, v3 phụ thuộc tuyến tính khi và chỉ khi r(A) = 3 khi và chỉ khi
m = 0.
Bài tập
Bài 2. Các hệ vectơ sau độc lập tuyến tính hay phụ thuộc tuyến tính?
a) {u1 = (1, −2, 3), u2 = (−2, 3, 4), u3 = (−1, 1, 7)}
b) {u1 = (1, −2, 3), v2 = (−2, 3, 4), u3 = (−1, 1, 1)}
c) {u1 = (2, 1, 3, 8), u2 = (1, 0, 1, 0), u3 = (0, 5, 0, 7), u4 = (0, 4, −1, −1)}
d) {u1 = (3, 1, 5, 7), u2 = (4, −1, −2, 2), u3 = (10, 1, 8, 17), u4 = (13, 2, 13, 24)}
e) {u1 = (1, 1, 5, 7), u2 = (1, −1, −2, 2), u3 = (2, 2, 10, 17), u4 = (3, 3, 15, 24)}
f) {u1 = (1, 1, 2, 2), u2 = (1, 2, 1, 0), u3 = (3, 1, 0, 0)}
g) {u1 = (1, 1, 2, 1), u2 = (2, 3, 1, 0), u3 = (0, −1, 3, 2)}
h) {u1 = (1, 2, 3), u2 = (0, 1, 0), u3 = (1, 3, 3)}
Bài 3. Cho các vectơ v1 = (2, 1, 1, 1); v2 = (2, 1, −1, 1); v3 = (10, 5, −1, m).
Với giá trị nào của m thì v1, v2, v3 độc lập tuyến tính?
Bài 4. Cho các vectơ v1 = (−2, 1, 3); v2 = (1, −4, 6); v3 = (2m, 2, m + 10).
Với giá trị nào của m thì v1, v2, v3 phụ thuộc tuyến tính?
4
Bài 5. Xác định m để hệ vectơ {u = (1, 1, 1), v = (m, 1, 1), w = (2, m, −1)}
độc lập tuyến tính.
Bài 6. Xác định m để hệ vectơ {u = (m, −1, −1), v = (−1, m, −1), w =
(−1, −1, m)} phụ thuộc tuyến tính.
1.3
Tổ hợp tuyến tính
Để kiểm tra vectơ u có là tổ hợp tuyến tính của các vectơ u1 ,. .., um ta
thực hiện như sau: Xét phương trình u = λ1 u1 + · · · + λm um với các ẩn là
λ1 ,. .., λm. Phương trình này tương đương với một hệ phương trình tuyến
tính m ẩn.
• Nếu phương trình có nghiệm thì u là tổ hợp tuyến tính của u1 ,. .., um .
• Nếu phương trình vô nghiệm thì u không là tổ hợp tuyến tính của
u1 ,. .., u m .
Ví dụ 1.10. Kiểm tra vectơ u = (1, 4, −3) có là tổ hợp tuyến tính của các
vectơ u1 = (2, 1, 1), u2 = (−1, 1, −1), u3 = (1, 1, −2) hay không?
Giải.
u
=
λ1 u1 + λ2 u2 + λ3 u3
⇔ (1, 4, −3) =
λ1 (2, 1, 1) + λ2 (−1, 1, −1) + λ3 (1, 1, −2)
⇔ (1, 4, −3) = (2λ1 − λ2 + λ
3, λ1 + λ2 + λ3, λ1 − λ2 − 2λ3 )
2λ1 − λ2 + λ3 = 1
Từ đây ta có hệ phương trình λ1 + λ2 + λ3 = 4
λ1 − λ2 − 2λ3 = −3
Nghiệm của hệ trên là λ1 = 1, λ2 = 2, λ3 = 1. Do đó u là tổ hợp tuyến
tính của u1, u2, u3 .
Ví dụ 1.11. Cho các vectơ v = (0, m, 0); v1 = (1, 2, 3); v2 = (1, 5, 2). Với giá
trị nào của m thì v là tổ hợp tuyến tính của v1 và v2 ?
Giải.
v
=
λ1 v1 + λ2 v2
⇔ (0, m, 0) =
λ1 (1, 2, 3) + λ2 (1, 5, 2)
⇔ (0, m, 0) = (λ1 + λ2, 2λ1 + 5λ2, 3λ1 + 2λ2 )
5
Từ đó ta
λ1 + λ2 =
có hệ 2λ1 + 5λ2 =
3λ1 + 2λ2 =
1
1 0
d →d2 −2d1
5 m −−2−−−
−−→ 0
d3 →d3 −3d1
2 0
0
1
A˜ = 2
3
1 1 0
0 −1 0
0 0 m
v là tổ hợp tuyến tính của v
1 và
1
˜
và chỉ khi r(A) = r(A) với A = 2
3
0
m
0
(∗)
1 0
1 1 0
d ↔d3
→d3 +3d2
0 −1 0 −d−3−
3 m −−2−−→
−−−−→
−1 0
0 3 m
v
2 khi và chỉ khi hệ (*) có nghiệm khi
1
5 khi và chỉ khi m = 0.
2
Bài tập
Bài 7. Cho vectơ x = (3, 5, 0), y = (7, 12, 1), u = (1, 2, 3), v = (2, 3, −4). Hỏi
a) x có là tổ hợp tuyến tính của u, v hay không?
b) y có là tổ hợp tuyến tính của u, v hay không?
Bài 8. Cho vectơ x = (1, −2, 1, 0), u = (2, 1, 0, −3), v = (4, −3, 2, 1). Hỏi x
có là tổ hợp tuyến tính của u, v hay không?
Bài 9. Cho các vectơ v = (2, m, 1); v1 = (0, 2, 3); v2 = (1, 5, 2). Với giá trị
nào của m thì v là tổ hợp tuyến tính của v1 và v2 ?
Bài 10. Cho vectơ x = (1, 3, 5), u = (3, 2, 5), v = (2, 4, 7) và w = (5, 6, k).
Xác định k để x là tổ hợp tuyến tính của hệ u, v, w.
Bài 11. Xác định m để vectơ (1, m, 1) là tổ hợp tuyến tính của
{u = (1, 1, 0), v = (2, 1, 1), w = (3, 2, 1)}
Bài 12. Tìm điều kiện để vectơ (x1, x2, x3 ) là một tổ hợp tuyến tính của
{u = (1, 2, 3), v = (2, 4, 5), w = (3, 6, 7)}
Bài 13. Tìm điều kiện để vectơ (x1, x2, x3 ) là một tổ hợp tuyến tính của
{u = (1, 0, 2), v = (1, 2, 8), w = (2, 3, 13)}
6
1.4
Cơ sở và số chiều
Để kiểm tra tập hợp con B của Rn có là cơ sở của Rn hay không, ta thực
hiện như sau:
• Nếu số phần tử của B khác n thì B không phải là cơ sở của Rn. Ngược
lại, B có số phần tử bằng n. Ta kiểm tra xem B có độc lập tuyến tính
hay không.
• Nếu B độc lập tuyến tính thì B là cơ sở của Rn. Ngược lại, B không
phải là cơ sở của Rn vì B phụ thuộc tuyến tính.
Ví dụ 1.12. Kiểm tra B = {(1, 1, 1), (1, −2, 1), (1, 2, −1)} có là cơ sở của R3
hay không?
Giải.
• B có số phần
1
• Xét A = 1
1
tử bằng số chiều của R3 .
1
1
−2 1 . Vì det(A) = 6 = 0 nên B độc lập tuyến tính.
2 −1
Vậy B là cơ sở của R3 .
Bài tập
Bài 14. Tập hợp nào sau đây là cơ sở của R2 ?
a) S = {(1, 1), (2, 2)}.
b) S = {(1, 1), (2, 1)}.
c) S = {(1, 2), (−2, −4)}.
d) S = {(−1, −1), (2, 2)}.
Bài 15. Hệ vectơ nào sau đây là cơ sở của R3 ?
a) B = {u1 = (1, 0, −1), u2 = (2, 3, 1), u3 = (1, 1, 0)}.
7
b) B = {u1 = (1, 1, 1), u2 = (0, 1, 1)}.
c) B = {u1 = (1, 1, −1), u2 = (1, 0, 2), u3 = (1, 1, 0)}.
d) B = {u1 = (1, 1, 2), u2 = (0, 1, 1), u3 = (2, 2, 4)}.
Bài 16. Kiểm tra tập hợp nào sau đây là cơ sở của R3 ?
a) B = {u1 = (2, 1, 1), u2 = (1, 2, 1), u3 = (1, 1, 2)}
b) B = {u1 = (1, 1, 0), u2 = (1, 0, 1), u3 = (0, 1, 1)}
c) B = {u1 = (−1, 1, 1), u2 = (1, 2, 1), u3 = (1, 5, 3)}
Bài 17. Trong không gian R3 cho các vectơ u1 = (1, 0, −1), u2 = (1, 2, −2), u3 =
(0, −3, 2) và đặt B = {u1, u2, u3 }. Chứng minh rằng B là một cơ sở của R3 .
Bài 18. Trong không gian R3 cho các vectơ u1 = (1, 1, 1), u2 = (0, 1, 1), u3 =
(0, 0, 2) và đặt B = {u1, u2, u3 }. Chứng minh rằng B là một cơ sở của R3 .
Bài 19. Xác định k để hệ {v1 = (−1, 1, 1), v2 = (1, 1, 1), v3 = (1, −1, k)} tạo
thành một cơ sở của R3 .
Bài 20. Tìm m để hệ {u = (1, 2, m), v = (1, m, 0), w = (m, 1, 0)} tạo thành
một cơ sở của R3 .
Bài 21. Tìm m để hệ {u = (m, 1, 1), v = (1, m, 1), w = (1, 1, m)} tạo thành
một cơ sở của R3 .
Bài 22. Tìm m để hệ {u1 = (3, 1, 2, m−1), u2 = (0, 0, m, 0), u3 = (2, 1, 4, 0), u4 =
(3, 2, 7, 0)} tạo thành một cơ sở của R4 .
Bài 23. Tìm m để hệ {u1 = (1, 2, 3, 4), u2 = (2, 3, 4, 5), u3 = (3, 4, 5, 6), u4 =
(4, 5, 6, m)} tạo thành một cơ sở của R4 .
1.5
Không gian con sinh bởi một tập hợp
Cho V là một không gian vectơ và S là một tập hợp con khác rỗng của V .
Đặt W là tập hợp tất cả các tổ hợp tuyến tính của các vectơ thuộc S. Không
gian W được xây dựng như trên được gọi là không gian sinh bởi tập hợp S và
được ký hiệu W = span(S). Khi đó tập hợp S được gọi là tập sinh của W .
Ta quy ước không gian sinh bởi tập rỗng là không gian {0}.
8
Mệnh đề 1.13. Cho S là một tập con của không gian vectơ V. Khi đó S là
tập sinh của V nếu và chỉ nếu mọi vectơ trong V đều là tổ hợp tuyến tính
của một số vectơ trong S.
Để tìm cơ sở của không gian sinh bởi tập hợp {u1 ,. .., um } ⊆ Rn, ta thực
hiện các bước sau:
u1
u2
• Đặt A = .. .
.
um
• Dùng thuật toán Gauss để đưa A về ma trận bậc thang B. Khi đó các
vectơ dòng khác 0 của B chính là cơ sở cần tìm.
Ví dụ 1.14. Cho S = {u1 = (1, 2, 3), u2 = (4, 5, 6), u3 = (7, 8, 9)} và W =
span(S) Tìm một cơ sở B của W và dim(W ).
1 2 3
1 2
3
d →d2 −4d1
Xem thêm: Hình ảnh trái đất đẹp nhất
Giải. A = 4 5 6 −−2−−−
−−→ 0 −3 −6
d3 →d3 −7d1
7 8 9
0 −6 −12
1 2 3
d3 →d3 −2d2
−−−−−
−−→ 0 1 2 .
d
d2 → −1
3 2
0 0 0
Vậy cơ sở của W là {(1, 2, 3), (0, 1, 2)} và dim(W ) = 2.
Ví dụ 1.15. Trong R4 cho không gian L sinh bởi hệ vectơ {(1, 2, −1, 0), (1, −1, 2, 1)}.
Hãy tìm m để vectơ (1, m, 2, m) thuộc không gian con L.
Giải. u = (1, m, 2, m) thuộc không gian con L khi và chỉ khi u là tổ hợp
tuyến tính của {(1, 2, −1, 0), (1, −1, 2, 1)}
u
=
λ1 (1, 2, −1, 0) + λ2 (1, −1, 2, 1)
⇔
(1, m, 2, m)
= (λ1 +
λ2, 2λ1 − λ2, −λ1 + 2λ2, λ2 )
λ1 + λ2 = 1
λ1 = 0
2λ1 − λ2 = m
λ2 = 1
⇔
⇔
−λ
+
2λ
=
2
m = λ2 = 1
1
2
λ2 = m
m = −λ2 = −1
Suy ra không có giá trị m để làm cho hệ trên có nghiệm. Do đó với mọi
m ∈ R thì u không thuộc không gian con L.
9
Bài tập
Bài 24. Cho không gian con W của R3 sinh bởi hệ vectơ {(1, −2, 3), (−2, 4, −6), (−1, 2, −3)}.
Hãy tìm cơ sở và số chiều của W .
Bài 25. Trong R4 hãy tìm cơ sở và số chiều của không gian con sinh bởi hệ
vectơ
{u = (−1, 2, 1, 0), v = (0, 1, −1, 1), w = (1, −1, −2, 1)}
Bài 26. Cho M = {(1, −1, 0), (2, 1, −1), (3, 0, −1), (1, 0, −1)}. Hãy xác định
cơ sở và số chiều của không gian con sinh bởi hệ vectơ M.
Bài 27. Trong R4 cho không gian W = Span{(1, 2, −3, 0), (2, 1, −4, 2), (−1, 1, 1, m)}.
Xác định m để dimW nhỏ nhất.
Bài 28. Trong R4 cho không gian W = Span{(1, 2, −3, 0), (3, 3, −7, 2), (−1, 1, 1, m2 )}.
Xác định m để dimW nhỏ nhất.
Bài 29. Trong R4 cho không gian L sinh bởi hệ vectơ {(1, 2, −1, 0), (1, −1, 2, 1)}.
Xác định m để vectơ (2, m, 1, m) thuộc không gian con L
Bài 30. Trong R4 cho không gian L sinh bởi hệ vectơ {(1, 2, −1, 0), (2, 1, 1, 1)}.
Xác định m để vectơ (4, m2, 2, m2 ) thuộc không gian con L
1.6
Không gian nghiệm
Để tìm cơ sở cho không gian nghiệm W của một hệ phương trình tuyến tính
thuần nhất gồm n ẩn, ta thực hiện như sau:
• Giải hệ phương trình và biểu diễn các ẩn phụ thuộc theo các ẩn tự do.
• Ứng với mỗi bộ các thành phần tự do, ta cho một thành phần bằng 1
và các thành phần còn lại bằng 0 để thu được một vectơ nghiệm của hệ.
Ta gọi vectơ nghiệm này là vectơ nghiệm căn bản. Tập hợp tất cả các
vectơ nghiệm căn bản của hệ sẽ tạo thành một cơ sở cho không gian
nghiệm W .
• Nếu hệ có nghiệm duy nhất X = 0 thì W = {0}. Khi đó cơ sở của W
là tập rỗng.
10
Ví dụ 1.16. Tìm cơ sở cho không gian nghiệm của hệ phương trình
x1 + x2 + x3 = 0
x1 + 2×2 + 2×3 = 0
x1 + 3×2 + 3×3 = 0
1 1 1
1 1 1
1 1 1
d2 →d2 −d1
d →d3 −2d2
Giải. 1 2 2 −−
−−−−→ 0 1 1 −−3−−−
−−→ 0 1 1
d3 →d3 −d1
1 3 3
0 2 2
0 0 0
0
x1 =
x 1 + x2 + x3 = 0
x2 = −α
⇔
x2 + x3 = 0
x3 = α ∈ R
Cho α = 1 ta có u = (0, −1, 1) là vectơ nghiệm căn bản của hệ. Vậy cơ
sở cần tìm là {u = (0, −1, 1)}.
Bài tập
Bài 31. Trong R3 cho không gian con W = {(x1, x2, x3 ) ∈ R3 | − x1 + x2 −
2×3 = 0}. Hãy tìm cơ sở của W
Bài 32. Tìm cơ sở không gian nghiệm của 2x − 5y + 3z = 0
Bài 33. Tìm cơ sở không gian nghiệm của hệ
x1 − x2 + 3×3 +
x1 + x2 − x3 −
x1 − 3×2 + 7×3 +
phương trình
x4 = 0
x4 = 0
2×4 = 0
Bài 34. Trong R3 cho không gian con W :
W =
(x1, x2, x3 ) ∈ R3 :
−x1 + x2 − 2×3 = 0
−2×1 + 3×2 − mx3 = 0
.
Tìm m để dimW = 1.
Bài 35. Trong R3 cho không gian con W :
−x1 + x2 − 2×3 = 0
W = (x1, x2, x3 ) ∈ R3 : −2×1 + 3×2 − 4×3 = 0 .
−3×1 + 4×2 + mx3 = 0
Tìm m để dimW = 1.
11
1.7
Tọa độ vectơ
Cho B = {u1 ,. .., un } là cơ sở của không gian vectơ V. Khi đó,
λ1
λ2
u = λ1 u1 + λ2 u2 + · · · + λn un ⇔ [u]B = ..
.
λn
Mệnh đề 1.17. Cho B = {u1 ,. .., un } là cơ sở của Rn. Khi đó, với mọi
u ∈ Rn, ta có: [u]B = (B0 → B)−1 [u]B0 = (uT1. .. uTn )−1 (uT ).
Ví dụ 1.18. Cho B1 = {u1 = (1, 0, 1), u2 = (1, 1, 0), u3 = (1, 1, 1)}, B2 =
{v1 = (1, 2, 3), v2 = (2, 3, 1), v3 = (3, 1, 2)}. Hãy tìm tọa độ của u = (x, y, z) ∈
R3 theo cơ sở B1 .
−1
1 1 1
x
x−y
Giải. [u]B1 = (uT1 uT2 uT3 )−1 (uT ) = 0 1 1 y = x − z .
1 0 1
z
y+z−x
Bài tập
Bài 36.
Cho
vectơ v và cơ sở S = {(1, −2, 3), (0, 4, −6), (0, 0, 4)}. Biết rằng
1
[v]S = −2, hãy xác định v.
0
Bài 37.Chocơ sở A = {(1, 1, 1), (1, 3, 3), (1, 2, 1)} và vectơ x có
8
[x]A = −3. Hãy tìm x.
2
Bài 38. Cho vectơ v = (0, 8, −4) và cơ sở S = {(1, 0, 0), (1, −4, 0), (0, 0, 4)}.
Hãy tìm [v]S .
Bài 39. Tìm tọa độ của vectơ u = (1, 2, 4), v = (m, 0, 1) theo cơ sở
S = {u1 = (1, 0, 0), u2 = (0, 1, 0), u3 = (0, 0, 1)}.
12
Bài 40. Cho cơ sở S = {(1, −1, 1), (2, 3, 1), (1, 2, 1)}. Tìm tọa độ của vectơ
u = (2, 6, 1) theo cơ sở S.
Bài 41. Tìm tọa độ của vectơ u = (2, 3, 6) theo cơ sở
S = {u1 = (1, 2, 3), u2 = (1, 3, 4), u3 = (2, 4, 7)}.
Bài 42. Tìm tọa độ của vectơ u = (1, 2m, 2) theo cơ sở
S = {u1 = (1, 0, 0), u2 = (0, 2, 0), u3 = (2, 1, 1)}.
Bài 43. Cho S = {(1, 1), (−1, 1)} là cơ sở của R2 và vectơ v sao cho [v]S =
2
. Tìm tọa độ của v theo cơ sở S = {(0, 1), (−1, 2)}.
1
Bài 44. Cho S = u1 = (1, 2, 2), u2
= (1,
−1, 1), u3 = (−1, 2, −1) là cơ sở
6
của R3 và vectơ v sao cho [v]S = 8 . Tìm tọa độ của v theo cơ sở
11
S = u1 = (1, 1, 2), u2 = (1, −2, 1), u3 = (2, 1, 4)
13
Chương 2
Ánh xạ tuyến tính
2.1
Kiểm tra và xác định ánh xạ tuyến tính
Ánh xạ f : Rn → Rm được gọi là ánh xạ tuyến tính nếu nó thỏa mãn các
điều kiện sau:
(i) f (u + v) = f (u) + f (v) với mọi u, v ∈ Rn .
(ii) f (λu) = λf (u) với mọi λ ∈ R và với mọi u ∈ Rn .
Ví dụ 2.1. Cho f : R3 → R2 xác định bởi f (x, y, z) = (x + y, y + z, z + x).
Chứng minh f là ánh xạ tuyến tính.
Giải. Lấy u = (x1, y1, z1 ), v = (x2, y2, z2 ) ∈ R3 và λ ∈ R. Ta có u + v =
(x1 + x2, y1 + y2, z1 + z2 ), λu = (λx1, λy1, λz1 ). Do đó f (u + v) = (x1 + x2 +
y1 + y2, y1 + y2 + z1 + z2, z1 + z2 + x1 + x2 ).
Vì vậy f (u + v) = f (u) + f (v). Hơn nữa
f (λu) = (λx + λy, λy + λz, λz + λx) = λf (u).
Vậy f là ánh xạ tuyến tính.
Bài tập
Bài 45. Ánh xạ nào sau đây là ánh xạ tuyến tính?
a) f : R3 → R3, f (x1, x2, x3 ) = (x3 + x2, 2×1 + x3, 3×1 − x2 + x3 )
14
b) f : R3 → R3, f (x1, x2, x3 ) = (x1, x2 + 1, x3 + 2)
c) f : R3 → R3, f (x1, x2, x3 ) = (2×1 + x2, x1 + x3, x23 )
d) f : R3 → R3, f (x1, x2, x3 ) = (x1 − x2 + x3, x3, x2 ).
e) f : R2 → R, f (x1, x2 ) = |x1 − x2 |
f) f : R2 → R2, f (x1, x2 ) = (x21, x22 )
2.2
Ma trận biểu diễn ánh xạ tuyến tính
Mệnh đề 2.2. Cho f ∈ L(Rn, Rm ) được xác định bởi f (x1 ,. .., xn ) =
(a11 x1 + · · · + a1n xn ,. .., am1 x1 + · · · +
amn xn ) và B
0, C0 lần lượt là cơ sở
a11. .. a1n
chính tắc của Rn, Rm. Khi đó [f ]B0 ,C0 = . .. .. .. .. . .
am1. .. amn
Mệnh đề 2.3. Cho f ∈ L(Rn ) được xác định bởi f (x1 ,. .., xn ) = (a11 x1 +
n
· · · + a1n
xn ,. .., an1 x
1 + · · · + ann xn ) và B0 là cơ sở chính tắc của R. Khi đó
a11. .. a1n
[f ]B0 =. .. .. .. .. .
an1. .. ann
Mệnh đề 2.4. Cho B = {u1 ,. .., un }, C = {v1 ,. .., vm } lần lượt là cơ sở của
Rn, Rm và f ∈ L(Rn, Rm ). Khi đó
T −1
[f ]B,C = (v1T. .. vm
) (f (u1 )T. .. f (un )T ).
Mệnh đề 2.5. Cho B = {u1 ,. .., un } là cơ sở của Rn. Khi đó
[f ]B = (uT1. .. uTn )−1 (f (u1 )T. .. f (un )T ).
Ví dụ 2.6. Cho f (x, y, z) = (x + y + z, 3x − 5y + 7z) và B0, C0 lần lượt là cơ
1 1 1
sở chính tắc của R3, R2. Khi đó [f ]B0 ,C0 =
.
3 −5 7
Ví dụ 2.7. Cho f (x, y, z) = (x + y + z, y + 2z) và B = {u1 = (1, 1, 0), u2 =
(1, 0, 1), u3 = (0, 1, 1)}, C = {v1 = (1, 2), v2 = (3, 5)} lần lượt là cơ sở của
R3, R2. Hãy xác định [f ]B,C .
15
Giải.
[f ]B,C = (v1T v2T )−1 (f (u1 )T f (u2 )T f (u3 )T )
−1
1 3
2 2 2
=
2 5
1 2 3
−7 −4 −1
=
.
3
2
1
Ví dụ 2.8. Cho f ∈ L(R2 ) xác định bởi f (x, y) = (x + y, x − y) và B0 là cơ
1 1
sở chính tắc của R2. Khi đó [f ]B0 =
.
1 −1
Ví dụ 2.9. Cho f ∈ L(R2 ) xác định bởi f (x, y) = (x + y, 2x − y) và B =
{u1 = (1, −2), u2 = (2, −3)} là cơ sở của R2. Hãy xác định [f ]B .
Giải.
[f ]B =
=
(uT1 uT2 )−1 (f (u1 )T f (u2 )T )
−1
1
2
−1 −1
−5 −11 .
=
−2 −3
4
7
2
5
Bài tập
Bài 46. Cho ánh xạ tuyến tính f : R3 → R2 xác định bởi
f (x1, x2, x3 ) = (x1 + x2, x1 − 2×3 ).
Hãy tìm ma trận biểu diễn của f đối với cặp cơ sở chính tắc của R3 và R2 .
Bài 47. Cho ánh xạ tuyến tính f : R2 → R2 xác định bởi f (x1, x2 ) =
(x1 + x2, x1 − x2 ). Hãy tìm ma trận biểu diễn của f đối với cơ sở chính tắc
của R2 .
Bài 48. Cho ánh xạ tuyến tính f : R2 → R2 xác định bởi
f (x1, x2 ) = (x1 + x2, x1 − x2 )
Giả sử B = {u1 = (1, 1), u2 = (1, 2)} là một cơ sở của R2. Hãy tìm ma trận
biểu diễn của f đối với cơ sở B.
16
Bài 49. Cho toán tử tuyến tính f ∈ L(R3 ) xác định bởi
f (x, y, z) = (x − y + z, x + 2y − 2z, x − 3y + 3z).
Hãy xác định ma trận biểu diễn của f đối với cơ sở B = {u1 = (1, 0, 1), u2 =
(1, −2, 0), u3 = (2, 1, 3)}
Bài 50. Cho ánh xạ tuyến tính f : R2 → R3 xác định bởi:
f (x1, x2 ) = (x1 + x2, x1 − x2, x2 ).
Giả sử B = {u1 = (1, 1), u2 = (1, 2)} là một cơ sở của R2 và C là cơ sở chính
tắc của R3. Hãy tìm ma trận biểu diễn của f đối với cặp cơ sở (B, C).
Bài 51. Cho ánh xạ tuyến tính f : R3 → R2 xác định bởi:
f (x, y, z) = (x + y − z, 2x − 3y + z)
Hãy xác định ma trận biểu diễn của f đối với cặp cơ sở B = {u1 =
(1, 0, −1), (1, 1, 0), (1, 0, 0)} (của R3 ) và C = {v1 = (1, 1), v2 = (2, 3)} (của
R2 )
2.3
Không gian ảnh và không gian nhân
Phương pháp xác định cơ sở của không gian nhân
Cho f ∈ L(Rn, Rm ). Để xác định cơ sở của Kerf ta thực hiện như sau:
• Xác định [f ]B0 ,C0 với B0, C0 lần lượt là cơ sở chính tắc của Rn, Rm .
• Tìm cơ sở của không gian nghiệm của hệ [f ]B0 ,C0 X = 0. Cơ sở của không
gian nhân chính là cơ sở của không gian nghiệm của hệ [f ]B0 ,C0 X = 0
Ví dụ 2.10. Cho f ∈ L(R3 ) xác định bởi f (x, y, z) = (x + y − z, x + 2y +
3z, 2x + 3y + 2z). Hãy tìm cơ sở của Kerf và tính null(f ).
R3 .
1 −1
1 1 −1
d3 →d3 −d2
1 4 −−
−−−−→ 0 1 4
1 4
0 0 0
5α
x 1 =
− x3 = 0
⇔ x2 = −4α
+ 4×3 = 0
x3 = α ∈ R
Giải. Gọi
của
B0 là cơsở chính tắc
1 1 −1
1
d →d2 −d1
[f ]B0 = 1 2 3 −−2−−−
−−→ 0
d3 →d3 −2d1
2 3 2
0
Từ đó ta có hệ
x 1 + x2
x2
17
Cho α = 1 ta có u = (5, −4, 1). Vậy cơ sở của Kerf là {u = (5, −4, 1)} và
null(f ) = 1.
Phương pháp xác định cơ sở của không gian ảnh
Cho f ∈ L(Rn, Rm ). Để xác định cơ sở của Imf ta thực hiện như sau:
• Xác định [f ]B0 ,C0 với B0, C0 lần lượt là cơ sở chính tắc của Rn, Rm .
• Tìm cơ sở của không gian dòng của ma trận ([f ]B0 ,C0 )T. Cơ sở của không
gian ảnh chính là cơ sở của không gian dòng của ma trận ([f ]B0 ,C0 )T .
Ví dụ 2.11. Cho f ∈ L(R3, R2 ) xác định bởi f (x, y, z) = (x + y + 2z, 2x +
y − 3z). Hãy tìm cơ sở của Imf và tính r(f ).
Giải. Gọi B0, C0 lần lượt là cơ sở chính tắc của R3, R2 .
1 1 2
[f ]B0 ,C0 =
. Suy ra
2 1 −3
1 2
1 2
1 2
d →d2 −d1
d →d3 −7d2
([f ]B0 ,C0 )T = 1 1 −−2−−−
−−→ 0 −1 −−3−−−
−−→ 0 −1.
d3 →d3 −2d1
2 −3
0 −7
0 0
Do đó cơ sở của Imf là {u1 = (1, 2), u2 = (0, −1)} và r(f ) = 2.
Bài tập
Bài 52. Cho toán tử f ∈ L(R3 ) xác định bởi f (x, y, z) = (x − y + z, x +
2y − 2z, x − 3y + 3z). Hãy tìm cơ sở của không gian ảnh (Im f) và không gian
nhân (Ker f) của f .
Bài 53. Cho toán tử f ∈ L(R3 ) xác định bởi f (x, y, z) = (x+2y, 3y −z, 2x+
z). Hãy tìm cơ sở của không gian ảnh (Im f ) và không gian nhân (Ker f )
của f .
Bài 54. Cho B = {(1, −1), (−2, 3)} là cơ sở của R2 .
a) Hãy xác định f ∈ L(R2 ) sao cho [f ]B =
1 2
3 −1
b) Hãy tìm cơ sở của không gian ảnh (Im f) và không gian nhân (Ker f)
của f
Bài 55. Cho B = {(1, 1, 1), (1, 1, 0), (1, 0, −1)} là cơ sở của R3 .
18
a) Hãy xác định f ∈ L(R2 ) sao cho [f ]B =
1 2
3 −1
b) Hãy tìm cơ sở của không gian ảnh (Im f) và không gian nhân (Ker f)
của f
Bài 56. Cho cặp cơ sở B = {(1, 1, 1), (1, 1, 0), (1, 0, −1)} B = {(1, −1), (−2, 3)}
(của R3 ) và C = {(2, −1), (−3, 2)} là cơ sở của R2. (của R2 )
a) Hãy xác định f ∈ L(R2 ) sao cho [f ]B,C =
2 1 −2
3 −1 1
b) Hãy tìm cơ sở của không gian ảnh (Im f) và không gian nhân (Ker f)
của f
19
nên λu ∈ W. Vậy W là không gian con của R3. Ví dụ 1.2. Kiểm tra tập hợp W = { ( x, y, z ) ∈ R3 | x + y + z = 1 } có là khônggian con của không gian R3 hay không ? Giải. Vì ( 0, 0, 0 ) ∈ / W nên W không phải là không gian con của R3. Ví dụ 1.3. Kiểm tra tập hợp W = { ( x, y, z ∈ R3 | xy = z ) } có là không giancon của không gian R3 hay không ? Giải. Chọn u = ( 1, 1, 1 ) ∈ W và λ = 2. Khi đó λu = 2 u = ( 2, 2, 2 ) ∈ / W.Suy ra W không phải là không gian con của R3. Bài tậpBài 1. Trong những tập hợp W sau đây thì tập hợp nào là không gian con củakhông gian R3 ? a ) W = { ( x1, x2, x3 ) | x1 ≥ 0 } b ) W = { ( x1, x2, x3 ) | x1 + 2×2 = 3×3 } c ) W = { ( x1, x2, x3 ) | x1 + 3×2 = 1 } d ) W = { ( x1, x2, x3 ) | x1 = x2 = x3 } e ) W = { ( x1, x2, x3 ) | x21 = x2 x3 } f ) W = { ( x1, x2, x3 ) | x1 x2 = 0 } g. W = { ( a, 0, 2 a ) | a ∈ R }. h. W = { ( a, − b, b + 1 ) | a, b ∈ R }. i. W = { ( a − b, a, a + b ) | a, b ∈ R }. j. W = { ( a, b, 0 ) | a, b ∈ R }. 1.2 Độc lập tuyến tính hay phụ thuộc vào tuyếntínhĐịnh lý 1.4. Cho u1 ,. .., um ∈ Rn . Hệ vectơ { u1 ,. .., um } độc lập tuyến tínhu1 u2 nếu và chỉ nếu hạng của A = .. bằng m. . unHệ quả 1.5. Cho u1 ,. .., um ∈ Rn . Hệ vectơ { u1 ,. .., um } phụ thuộc vào tuyếnu1 u2 tính nếu và chỉ nếu hạng của A = .. khác m. . un u1 u2 Chú ý 1.6. Trong trường hợp m = n, đặt A = .. . . un • Hệ vectơ { u1 ,. .., un } độc lập tuyến tính nếu và chỉ nếu det ( A ) = 0. • Hệ vectơ { u1 ,. .., un } phụ thuộc vào tuyến tính nếu và chỉ nếu det ( A ) = 0. Ví dụ 1.7. Xác định tập hợp những vectơ u1 = ( 1, 2, 3, 1 ), u2 = ( 1, 1, 2, 3 ), u3 ( 1, 3, 1, 2 ) là độc lập tuyến tính hay nhờ vào tuyến tính ? 1 2 3 11 23 1 d2 → d2 − d1d3 → d3 + d2Giải. A = 1 1 2 3 − − − − − − → 0 − 1 − 1 2 − − − − − − → 0 d3 → d3 − d11 3 1 20 1 − 2 1D o đó r ( A ) = 3. Suy ra { u1, u2, u3 } độc lập tuyến tính. 3 1 − 1 − 1 2 . 0 − 3 3V í dụ 1.8. Xác định tập hợp những vectơ u1 = ( 1, 1, 1 ), u2 = ( 1, − 2, 1 ), u3 = ( − 1, 2, − 1 ) là độc lập tuyến tính hay phụ thuộc vào tuyến tính. Giải. Xét A = 1 − 2 1 . Vì det ( A ) = 0 nên hệ những vectơ − 1 2 − 1 { u1, u2, u3 } phụ thuộc vào tuyến tính. Ví dụ 1.9. Cho những vectơ v1 = ( 2, 1, 1, 1 ) ; v2 = ( 2, 1, − 1, 1 ) ; v3 = ( 0, 0, 0, m ). a. Tìm m để v1, v2, v3 độc lập tuyến tính. b. Tìm m để v1, v2, v3 nhờ vào tuyến tính. 2 1 1 12 1 1 1 d2 → d2 − d1Giải. A = 2 1 − 1 1 − − − − − − → 0 0 − 2 0 0 0 0 m0 0 0 ma. v1, v2, v3 độc lập tuyến tính khi và chỉ khi r ( A ) = 3 khi và chỉ khim = 0. b. v1, v2, v3 nhờ vào tuyến tính khi và chỉ khi r ( A ) = 3 khi và chỉ khim = 0. Bài tậpBài 2. Các hệ vectơ sau độc lập tuyến tính hay phụ thuộc vào tuyến tính ? a ) { u1 = ( 1, − 2, 3 ), u2 = ( − 2, 3, 4 ), u3 = ( − 1, 1, 7 ) } b ) { u1 = ( 1, − 2, 3 ), v2 = ( − 2, 3, 4 ), u3 = ( − 1, 1, 1 ) } c ) { u1 = ( 2, 1, 3, 8 ), u2 = ( 1, 0, 1, 0 ), u3 = ( 0, 5, 0, 7 ), u4 = ( 0, 4, − 1, − 1 ) } d ) { u1 = ( 3, 1, 5, 7 ), u2 = ( 4, − 1, − 2, 2 ), u3 = ( 10, 1, 8, 17 ), u4 = ( 13, 2, 13, 24 ) } e ) { u1 = ( 1, 1, 5, 7 ), u2 = ( 1, − 1, − 2, 2 ), u3 = ( 2, 2, 10, 17 ), u4 = ( 3, 3, 15, 24 ) } f ) { u1 = ( 1, 1, 2, 2 ), u2 = ( 1, 2, 1, 0 ), u3 = ( 3, 1, 0, 0 ) } g ) { u1 = ( 1, 1, 2, 1 ), u2 = ( 2, 3, 1, 0 ), u3 = ( 0, − 1, 3, 2 ) } h ) { u1 = ( 1, 2, 3 ), u2 = ( 0, 1, 0 ), u3 = ( 1, 3, 3 ) } Bài 3. Cho những vectơ v1 = ( 2, 1, 1, 1 ) ; v2 = ( 2, 1, − 1, 1 ) ; v3 = ( 10, 5, − 1, m ). Với giá trị nào của m thì v1, v2, v3 độc lập tuyến tính ? Bài 4. Cho những vectơ v1 = ( − 2, 1, 3 ) ; v2 = ( 1, − 4, 6 ) ; v3 = ( 2 m, 2, m + 10 ). Với giá trị nào của m thì v1, v2, v3 nhờ vào tuyến tính ? Bài 5. Xác định m để hệ vectơ { u = ( 1, 1, 1 ), v = ( m, 1, 1 ), w = ( 2, m, − 1 ) } độc lập tuyến tính. Bài 6. Xác định m để hệ vectơ { u = ( m, − 1, − 1 ), v = ( − 1, m, − 1 ), w = ( − 1, − 1, m ) } nhờ vào tuyến tính. 1.3 Tổ hợp tuyến tínhĐể kiểm tra vectơ u có là tổ hợp tuyến tính của những vectơ u1 ,. .., um tathực hiện như sau : Xét phương trình u = λ1 u1 + · · · + λm um với những ẩn làλ1 ,. .., λm. Phương trình này tương tự với một hệ phương trình tuyếntính m ẩn. • Nếu phương trình có nghiệm thì u là tổ hợp tuyến tính của u1 ,. .., um. • Nếu phương trình vô nghiệm thì u không là tổ hợp tuyến tính củau1 ,. .., u m. Ví dụ 1.10. Kiểm tra vectơ u = ( 1, 4, − 3 ) có là tổ hợp tuyến tính của cácvectơ u1 = ( 2, 1, 1 ), u2 = ( − 1, 1, − 1 ), u3 = ( 1, 1, − 2 ) hay không ? Giải. λ1 u1 + λ2 u2 + λ3 u3 ⇔ ( 1, 4, − 3 ) = λ1 ( 2, 1, 1 ) + λ2 ( − 1, 1, − 1 ) + λ3 ( 1, 1, − 2 ) ⇔ ( 1, 4, − 3 ) = ( 2 λ1 − λ2 + λ 3, λ1 + λ2 + λ3, λ1 − λ2 − 2 λ3 ) 2 λ1 − λ2 + λ3 = 1T ừ đây ta có hệ phương trình λ1 + λ2 + λ3 = 4 λ1 − λ2 − 2 λ3 = − 3N ghiệm của hệ trên là λ1 = 1, λ2 = 2, λ3 = 1. Do đó u là tổ hợp tuyếntính của u1, u2, u3. Ví dụ 1.11. Cho những vectơ v = ( 0, m, 0 ) ; v1 = ( 1, 2, 3 ) ; v2 = ( 1, 5, 2 ). Với giátrị nào của m thì v là tổ hợp tuyến tính của v1 và v2 ? Giải. λ1 v1 + λ2 v2 ⇔ ( 0, m, 0 ) = λ1 ( 1, 2, 3 ) + λ2 ( 1, 5, 2 ) ⇔ ( 0, m, 0 ) = ( λ1 + λ2, 2 λ1 + 5 λ2, 3 λ1 + 2 λ2 ) Từ đó ta λ1 + λ2 = có hệ 2 λ1 + 5 λ2 = 3 λ1 + 2 λ2 = 1 0 d → d2 − 2 d15 m − − 2 − − − − − → 0 d3 → d3 − 3 d12 0A ˜ = 21 1 0 0 − 1 0 0 0 mv là tổ hợp tuyến tính của v 1 vàvà chỉ khi r ( A ) = r ( A ) với A = 2 ( ∗ ) 1 01 1 0 d ↔ d3 → d3 + 3 d2 0 − 1 0 − d − 3 − 3 m − − 2 − − → − − − − → − 1 00 3 mv 2 khi và chỉ khi hệ ( * ) có nghiệm khi5 khi và chỉ khi m = 0. Bài tậpBài 7. Cho vectơ x = ( 3, 5, 0 ), y = ( 7, 12, 1 ), u = ( 1, 2, 3 ), v = ( 2, 3, − 4 ). Hỏia ) x có là tổ hợp tuyến tính của u, v hay không ? b ) y có là tổ hợp tuyến tính của u, v hay không ? Bài 8. Cho vectơ x = ( 1, − 2, 1, 0 ), u = ( 2, 1, 0, − 3 ), v = ( 4, − 3, 2, 1 ). Hỏi xcó là tổ hợp tuyến tính của u, v hay không ? Bài 9. Cho những vectơ v = ( 2, m, 1 ) ; v1 = ( 0, 2, 3 ) ; v2 = ( 1, 5, 2 ). Với giá trịnào của m thì v là tổ hợp tuyến tính của v1 và v2 ? Bài 10. Cho vectơ x = ( 1, 3, 5 ), u = ( 3, 2, 5 ), v = ( 2, 4, 7 ) và w = ( 5, 6, k ). Xác định k để x là tổ hợp tuyến tính của hệ u, v, w. Bài 11. Xác định m để vectơ ( 1, m, 1 ) là tổ hợp tuyến tính của { u = ( 1, 1, 0 ), v = ( 2, 1, 1 ), w = ( 3, 2, 1 ) } Bài 12. Tìm điều kiện kèm theo để vectơ ( x1, x2, x3 ) là một tổ hợp tuyến tính của { u = ( 1, 2, 3 ), v = ( 2, 4, 5 ), w = ( 3, 6, 7 ) } Bài 13. Tìm điều kiện kèm theo để vectơ ( x1, x2, x3 ) là một tổ hợp tuyến tính của { u = ( 1, 0, 2 ), v = ( 1, 2, 8 ), w = ( 2, 3, 13 ) } 1.4 Cơ sở và số chiềuĐể kiểm tra tập hợp con B của Rn có là cơ sở của Rn hay không, ta thựchiện như sau : • Nếu số thành phần của B khác n thì B không phải là cơ sở của Rn. Ngượclại, B có số thành phần bằng n. Ta kiểm tra xem B có độc lập tuyến tínhhay không. • Nếu B độc lập tuyến tính thì B là cơ sở của Rn. Ngược lại, B khôngphải là cơ sở của Rn vì B phụ thuộc vào tuyến tính. Ví dụ 1.12. Kiểm tra B = { ( 1, 1, 1 ), ( 1, − 2, 1 ), ( 1, 2, − 1 ) } có là cơ sở của R3hay không ? Giải. • B có số phần • Xét A = 1 tử bằng số chiều của R3. − 2 1 . Vì det ( A ) = 6 = 0 nên B độc lập tuyến tính. 2 − 1V ậy B là cơ sở của R3. Bài tậpBài 14. Tập hợp nào sau đây là cơ sở của R2 ? a ) S = { ( 1, 1 ), ( 2, 2 ) }. b ) S = { ( 1, 1 ), ( 2, 1 ) }. c ) S = { ( 1, 2 ), ( − 2, − 4 ) }. d ) S = { ( − 1, − 1 ), ( 2, 2 ) }. Bài 15. Hệ vectơ nào sau đây là cơ sở của R3 ? a ) B = { u1 = ( 1, 0, − 1 ), u2 = ( 2, 3, 1 ), u3 = ( 1, 1, 0 ) }. b ) B = { u1 = ( 1, 1, 1 ), u2 = ( 0, 1, 1 ) }. c ) B = { u1 = ( 1, 1, − 1 ), u2 = ( 1, 0, 2 ), u3 = ( 1, 1, 0 ) }. d ) B = { u1 = ( 1, 1, 2 ), u2 = ( 0, 1, 1 ), u3 = ( 2, 2, 4 ) }. Bài 16. Kiểm tra tập hợp nào sau đây là cơ sở của R3 ? a ) B = { u1 = ( 2, 1, 1 ), u2 = ( 1, 2, 1 ), u3 = ( 1, 1, 2 ) } b ) B = { u1 = ( 1, 1, 0 ), u2 = ( 1, 0, 1 ), u3 = ( 0, 1, 1 ) } c ) B = { u1 = ( − 1, 1, 1 ), u2 = ( 1, 2, 1 ), u3 = ( 1, 5, 3 ) } Bài 17. Trong không gian R3 cho những vectơ u1 = ( 1, 0, − 1 ), u2 = ( 1, 2, − 2 ), u3 = ( 0, − 3, 2 ) và đặt B = { u1, u2, u3 }. Chứng minh rằng B là một cơ sở của R3. Bài 18. Trong không gian R3 cho những vectơ u1 = ( 1, 1, 1 ), u2 = ( 0, 1, 1 ), u3 = ( 0, 0, 2 ) và đặt B = { u1, u2, u3 }. Chứng minh rằng B là một cơ sở của R3. Bài 19. Xác định k để hệ { v1 = ( − 1, 1, 1 ), v2 = ( 1, 1, 1 ), v3 = ( 1, − 1, k ) } tạothành một cơ sở của R3. Bài 20. Tìm m để hệ { u = ( 1, 2, m ), v = ( 1, m, 0 ), w = ( m, 1, 0 ) } tạo thànhmột cơ sở của R3. Bài 21. Tìm m để hệ { u = ( m, 1, 1 ), v = ( 1, m, 1 ), w = ( 1, 1, m ) } tạo thànhmột cơ sở của R3. Bài 22. Tìm m để hệ { u1 = ( 3, 1, 2, m − 1 ), u2 = ( 0, 0, m, 0 ), u3 = ( 2, 1, 4, 0 ), u4 = ( 3, 2, 7, 0 ) } tạo thành một cơ sở của R4. Bài 23. Tìm m để hệ { u1 = ( 1, 2, 3, 4 ), u2 = ( 2, 3, 4, 5 ), u3 = ( 3, 4, 5, 6 ), u4 = ( 4, 5, 6, m ) } tạo thành một cơ sở của R4. 1.5 Không gian con sinh bởi một tập hợpCho V là một không gian vectơ và S là một tập hợp con khác rỗng của V. Đặt W là tập hợp tổng thể những tổ hợp tuyến tính của những vectơ thuộc S. Khônggian W được thiết kế xây dựng như trên được gọi là không gian sinh bởi tập hợp S vàđược ký hiệu W = span ( S ). Khi đó tập hợp S được gọi là tập sinh của W. Ta quy ước không gian sinh bởi tập rỗng là không gian { 0 }. Mệnh đề 1.13. Cho S là một tập con của không gian vectơ V. Khi đó S làtập sinh của V nếu và chỉ nếu mọi vectơ trong V đều là tổ hợp tuyến tínhcủa một số ít vectơ trong S.Để tìm cơ sở của không gian sinh bởi tập hợp { u1 ,. .., um } ⊆ Rn, ta thựchiện những bước sau : u1 u2 • Đặt A = .. . . um • Dùng thuật toán Gauss để đưa A về ma trận bậc thang B. Khi đó cácvectơ dòng khác 0 của B chính là cơ sở cần tìm. Ví dụ 1.14. Cho S = { u1 = ( 1, 2, 3 ), u2 = ( 4, 5, 6 ), u3 = ( 7, 8, 9 ) } và W = span ( S ) Tìm một cơ sở B của W và dim ( W ). 1 2 31 2 d → d2 − 4 d1Giải. A = 4 5 6 − − 2 − − − − − → 0 − 3 − 6 d3 → d3 − 7 d17 8 90 − 6 − 121 2 3 d3 → d3 − 2 d2 − − − − − − − → 0 1 2 . d2 → − 13 20 0 0V ậy cơ sở của W là { ( 1, 2, 3 ), ( 0, 1, 2 ) } và dim ( W ) = 2. Ví dụ 1.15. Trong R4 cho không gian L sinh bởi hệ vectơ { ( 1, 2, − 1, 0 ), ( 1, − 1, 2, 1 ) }. Hãy tìm m để vectơ ( 1, m, 2, m ) thuộc không gian con L.Giải. u = ( 1, m, 2, m ) thuộc không gian con L khi và chỉ khi u là tổ hợptuyến tính của { ( 1, 2, − 1, 0 ), ( 1, − 1, 2, 1 ) } λ1 ( 1, 2, − 1, 0 ) + λ2 ( 1, − 1, 2, 1 ) ⇔ ( 1, m, 2, m ) = ( λ1 + λ2, 2 λ1 − λ2, − λ1 + 2 λ2, λ2 ) λ1 + λ2 = 1 λ1 = 02 λ1 − λ2 = mλ2 = 1 − λ2λm = λ2 = 1 λ2 = mm = − λ2 = − 1S uy ra không có giá trị m để làm cho hệ trên có nghiệm. Do đó với mọim ∈ R thì u không thuộc không gian con L.Bài tậpBài 24. Cho không gian con W của R3 sinh bởi hệ vectơ { ( 1, − 2, 3 ), ( − 2, 4, − 6 ), ( − 1, 2, − 3 ) }. Hãy tìm cơ sở và số chiều của W. Bài 25. Trong R4 hãy tìm cơ sở và số chiều của không gian con sinh bởi hệvectơ { u = ( − 1, 2, 1, 0 ), v = ( 0, 1, − 1, 1 ), w = ( 1, − 1, − 2, 1 ) } Bài 26. Cho M = { ( 1, − 1, 0 ), ( 2, 1, − 1 ), ( 3, 0, − 1 ), ( 1, 0, − 1 ) }. Hãy xác địnhcơ sở và số chiều của không gian con sinh bởi hệ vectơ M.Bài 27. Trong R4 cho không gian W = Span { ( 1, 2, − 3, 0 ), ( 2, 1, − 4, 2 ), ( − 1, 1, 1, m ) }. Xác định m để dimW nhỏ nhất. Bài 28. Trong R4 cho không gian W = Span { ( 1, 2, − 3, 0 ), ( 3, 3, − 7, 2 ), ( − 1, 1, 1, mét vuông ) }. Xác định m để dimW nhỏ nhất. Bài 29. Trong R4 cho không gian L sinh bởi hệ vectơ { ( 1, 2, − 1, 0 ), ( 1, − 1, 2, 1 ) }. Xác định m để vectơ ( 2, m, 1, m ) thuộc không gian con LBài 30. Trong R4 cho không gian L sinh bởi hệ vectơ { ( 1, 2, − 1, 0 ), ( 2, 1, 1, 1 ) }. Xác định m để vectơ ( 4, mét vuông, 2, mét vuông ) thuộc không gian con L1. 6K hông gian nghiệmĐể tìm cơ sở cho không gian nghiệm W của một hệ phương trình tuyến tínhthuần nhất gồm n ẩn, ta triển khai như sau : • Giải hệ phương trình và màn biểu diễn những ẩn phụ thuộc vào theo những ẩn tự do. • Ứng với mỗi bộ những thành phần tự do, ta cho một thành phần bằng 1 và những thành phần còn lại bằng 0 để thu được một vectơ nghiệm của hệ. Ta gọi vectơ nghiệm này là vectơ nghiệm cơ bản. Tập hợp toàn bộ cácvectơ nghiệm cơ bản của hệ sẽ tạo thành một cơ sở cho không giannghiệm W. • Nếu hệ có nghiệm duy nhất X = 0 thì W = { 0 }. Khi đó cơ sở của Wlà tập rỗng. 10V í dụ 1.16. Tìm cơ sở cho không gian nghiệm của hệ phương trình x1 + x2 + x3 = 0x1 + 2×2 + 2×3 = 0x1 + 3×2 + 3×3 = 01 1 11 1 11 1 1 d2 → d2 − d1d → d3 − 2 d2Giải. 1 2 2 − − − − − − → 0 1 1 − − 3 − − − − − → 0 1 1 d3 → d3 − d11 3 30 2 20 0 0 x1 = x 1 + x2 + x3 = 0x2 = − αx2 + x3 = 0x3 = α ∈ RCho α = 1 ta có u = ( 0, − 1, 1 ) là vectơ nghiệm cơ bản của hệ. Vậy cơsở cần tìm là { u = ( 0, − 1, 1 ) }. Bài tậpBài 31. Trong R3 cho không gian con W = { ( x1, x2, x3 ) ∈ R3 | − x1 + x2 − 2×3 = 0 }. Hãy tìm cơ sở của WBài 32. Tìm cơ sở không gian nghiệm của 2 x − 5 y + 3 z = 0B ài 33. Tìm cơ sở không gian nghiệm của hệ x1 − x2 + 3×3 + x1 + x2 − x3 − x1 − 3×2 + 7×3 + phương trìnhx4 = 0x4 = 02×4 = 0B ài 34. Trong R3 cho không gian con W : W = ( x1, x2, x3 ) ∈ R3 : − x1 + x2 − 2×3 = 0 − 2×1 + 3×2 − mx3 = 0T ìm m để dimW = 1. Bài 35. Trong R3 cho không gian con W : − x1 + x2 − 2×3 = 0 W = ( x1, x2, x3 ) ∈ R3 : − 2×1 + 3×2 − 4×3 = 0. − 3×1 + 4×2 + mx3 = 0T ìm m để dimW = 1.111.7 Tọa độ vectơCho B = { u1 ,. .., un } là cơ sở của không gian vectơ V. Khi đó, λ1 λ2 u = λ1 u1 + λ2 u2 + · · · + λn un ⇔ [ u ] B = .. . λnMệnh đề 1.17. Cho B = { u1 ,. .., un } là cơ sở của Rn. Khi đó, với mọiu ∈ Rn, ta có : [ u ] B = ( B0 → B ) − 1 [ u ] B0 = ( uT1. .. uTn ) − 1 ( uT ). Ví dụ 1.18. Cho B1 = { u1 = ( 1, 0, 1 ), u2 = ( 1, 1, 0 ), u3 = ( 1, 1, 1 ) }, B2 = { v1 = ( 1, 2, 3 ), v2 = ( 2, 3, 1 ), v3 = ( 3, 1, 2 ) }. Hãy tìm tọa độ của u = ( x, y, z ) ∈ R3 theo cơ sở B1. − 1 1 1 1 x − yGiải. [ u ] B1 = ( uT1 uT2 uT3 ) − 1 ( uT ) = 0 1 1 y = x − z . 1 0 1 y + z − xBài tậpBài 36. Cho vectơ v và cơ sở S = { ( 1, − 2, 3 ), ( 0, 4, − 6 ), ( 0, 0, 4 ) }. Biết rằng [ v ] S = − 2 , hãy xác lập v. Bài 37. Cho cơ sở A = { ( 1, 1, 1 ), ( 1, 3, 3 ), ( 1, 2, 1 ) } và vectơ x có [ x ] A = − 3 . Hãy tìm x. Bài 38. Cho vectơ v = ( 0, 8, − 4 ) và cơ sở S = { ( 1, 0, 0 ), ( 1, − 4, 0 ), ( 0, 0, 4 ) }. Hãy tìm [ v ] S. Bài 39. Tìm tọa độ của vectơ u = ( 1, 2, 4 ), v = ( m, 0, 1 ) theo cơ sởS = { u1 = ( 1, 0, 0 ), u2 = ( 0, 1, 0 ), u3 = ( 0, 0, 1 ) }. 12B ài 40. Cho cơ sở S = { ( 1, − 1, 1 ), ( 2, 3, 1 ), ( 1, 2, 1 ) }. Tìm tọa độ của vectơu = ( 2, 6, 1 ) theo cơ sở S.Bài 41. Tìm tọa độ của vectơ u = ( 2, 3, 6 ) theo cơ sởS = { u1 = ( 1, 2, 3 ), u2 = ( 1, 3, 4 ), u3 = ( 2, 4, 7 ) }. Bài 42. Tìm tọa độ của vectơ u = ( 1, 2 m, 2 ) theo cơ sởS = { u1 = ( 1, 0, 0 ), u2 = ( 0, 2, 0 ), u3 = ( 2, 1, 1 ) }. Bài 43. Cho S = { ( 1, 1 ), ( − 1, 1 ) } là cơ sở của R2 và vectơ v sao cho [ v ] S =. Tìm tọa độ của v theo cơ sở S = { ( 0, 1 ), ( − 1, 2 ) }. Bài 44. Cho S = u1 = ( 1, 2, 2 ), u2 = ( 1, − 1, 1 ), u3 = ( − 1, 2, − 1 ) là cơ sởcủa R3 và vectơ v sao cho [ v ] S = 8 . Tìm tọa độ của v theo cơ sở11S = u1 = ( 1, 1, 2 ), u2 = ( 1, − 2, 1 ), u3 = ( 2, 1, 4 ) 13C hương 2 Ánh xạ tuyến tính2. 1K iểm tra và xác lập ánh xạ tuyến tínhÁnh xạ f : Rn → Rm được gọi là ánh xạ tuyến tính nếu nó thỏa mãn nhu cầu cácđiều kiện sau : ( i ) f ( u + v ) = f ( u ) + f ( v ) với mọi u, v ∈ Rn. ( ii ) f ( λu ) = λf ( u ) với mọi λ ∈ R và với mọi u ∈ Rn. Ví dụ 2.1. Cho f : R3 → R2 xác lập bởi f ( x, y, z ) = ( x + y, y + z, z + x ). Chứng minh f là ánh xạ tuyến tính. Giải. Lấy u = ( x1, y1, z1 ), v = ( x2, y2, z2 ) ∈ R3 và λ ∈ R. Ta có u + v = ( x1 + x2, y1 + y2, z1 + z2 ), λu = ( λx1, λy1, λz1 ). Do đó f ( u + v ) = ( x1 + x2 + y1 + y2, y1 + y2 + z1 + z2, z1 + z2 + x1 + x2 ). Vì vậy f ( u + v ) = f ( u ) + f ( v ). Hơn nữaf ( λu ) = ( λx + λy, λy + λz, λz + λx ) = λf ( u ). Vậy f là ánh xạ tuyến tính. Bài tậpBài 45. Ánh xạ nào sau đây là ánh xạ tuyến tính ? a ) f : R3 → R3, f ( x1, x2, x3 ) = ( x3 + x2, 2×1 + x3, 3×1 − x2 + x3 ) 14 b ) f : R3 → R3, f ( x1, x2, x3 ) = ( x1, x2 + 1, x3 + 2 ) c ) f : R3 → R3, f ( x1, x2, x3 ) = ( 2×1 + x2, x1 + x3, x23 ) d ) f : R3 → R3, f ( x1, x2, x3 ) = ( x1 − x2 + x3, x3, x2 ). e ) f : R2 → R, f ( x1, x2 ) = | x1 − x2 | f ) f : R2 → R2, f ( x1, x2 ) = ( x21, x22 ) 2.2 Ma trận trình diễn ánh xạ tuyến tínhMệnh đề 2.2. Cho f ∈ L ( Rn, Rm ) được xác lập bởi f ( x1 ,. .., xn ) = ( a11 x1 + · · · + a1n xn ,. .., am1 x1 + · · · + amn xn ) và B 0, C0 lần lượt là cơ sởa11. .. a1nchính tắc của Rn, Rm. Khi đó [ f ] B0, C0 = . .. .. .. .. . . am1. .. amnMệnh đề 2.3. Cho f ∈ L ( Rn ) được xác lập bởi f ( x1 ,. .., xn ) = ( a11 x1 + · · · + a1n xn ,. .., an1 x 1 + · · · + ann xn ) và B0 là cơ sở chính tắc của R. Khi đóa11. .. a1n [ f ] B0 =. .. .. .. .. . an1. .. annMệnh đề 2.4. Cho B = { u1 ,. .., un }, C = { v1 ,. .., vm } lần lượt là cơ sở củaRn, Rm và f ∈ L ( Rn, Rm ). Khi đóT − 1 [ f ] B, C = ( v1T. .. vm ) ( f ( u1 ) T. .. f ( un ) T ). Mệnh đề 2.5. Cho B = { u1 ,. .., un } là cơ sở của Rn. Khi đó [ f ] B = ( uT1. .. uTn ) − 1 ( f ( u1 ) T. .. f ( un ) T ). Ví dụ 2.6. Cho f ( x, y, z ) = ( x + y + z, 3 x − 5 y + 7 z ) và B0, C0 lần lượt là cơ1 1 1 sở chính tắc của R3, R2. Khi đó [ f ] B0, C0 = 3 − 5 7V í dụ 2.7. Cho f ( x, y, z ) = ( x + y + z, y + 2 z ) và B = { u1 = ( 1, 1, 0 ), u2 = ( 1, 0, 1 ), u3 = ( 0, 1, 1 ) }, C = { v1 = ( 1, 2 ), v2 = ( 3, 5 ) } lần lượt là cơ sở củaR3, R2. Hãy xác lập [ f ] B, C. 15G iải. [ f ] B, C = ( v1T v2T ) − 1 ( f ( u1 ) T f ( u2 ) T f ( u3 ) T ) − 11 32 2 22 51 2 3 − 7 − 4 − 1V í dụ 2.8. Cho f ∈ L ( R2 ) xác lập bởi f ( x, y ) = ( x + y, x − y ) và B0 là cơ1 1 sở chính tắc của R2. Khi đó [ f ] B0 = 1 − 1V í dụ 2.9. Cho f ∈ L ( R2 ) xác lập bởi f ( x, y ) = ( x + y, 2 x − y ) và B = { u1 = ( 1, − 2 ), u2 = ( 2, − 3 ) } là cơ sở của R2. Hãy xác lập [ f ] B. Giải. [ f ] B = ( uT1 uT2 ) − 1 ( f ( u1 ) T f ( u2 ) T ) − 1 − 1 − 1 − 5 − 11. − 2 − 3B ài tậpBài 46. Cho ánh xạ tuyến tính f : R3 → R2 xác lập bởif ( x1, x2, x3 ) = ( x1 + x2, x1 − 2×3 ). Hãy tìm ma trận trình diễn của f so với cặp cơ sở chính tắc của R3 và R2. Bài 47. Cho ánh xạ tuyến tính f : R2 → R2 xác lập bởi f ( x1, x2 ) = ( x1 + x2, x1 − x2 ). Hãy tìm ma trận trình diễn của f so với cơ sở chính tắccủa R2. Bài 48. Cho ánh xạ tuyến tính f : R2 → R2 xác lập bởif ( x1, x2 ) = ( x1 + x2, x1 − x2 ) Giả sử B = { u1 = ( 1, 1 ), u2 = ( 1, 2 ) } là một cơ sở của R2. Hãy tìm ma trậnbiểu diễn của f so với cơ sở B. 16B ài 49. Cho toán tử tuyến tính f ∈ L ( R3 ) xác lập bởif ( x, y, z ) = ( x − y + z, x + 2 y − 2 z, x − 3 y + 3 z ). Hãy xác lập ma trận trình diễn của f so với cơ sở B = { u1 = ( 1, 0, 1 ), u2 = ( 1, − 2, 0 ), u3 = ( 2, 1, 3 ) } Bài 50. Cho ánh xạ tuyến tính f : R2 → R3 xác lập bởi : f ( x1, x2 ) = ( x1 + x2, x1 − x2, x2 ). Giả sử B = { u1 = ( 1, 1 ), u2 = ( 1, 2 ) } là một cơ sở của R2 và C là cơ sở chínhtắc của R3. Hãy tìm ma trận trình diễn của f so với cặp cơ sở ( B, C ). Bài 51. Cho ánh xạ tuyến tính f : R3 → R2 xác lập bởi : f ( x, y, z ) = ( x + y − z, 2 x − 3 y + z ) Hãy xác lập ma trận trình diễn của f so với cặp cơ sở B = { u1 = ( 1, 0, − 1 ), ( 1, 1, 0 ), ( 1, 0, 0 ) } ( của R3 ) và C = { v1 = ( 1, 1 ), v2 = ( 2, 3 ) } ( củaR2 ) 2.3 Không gian ảnh và không gian nhânPhương pháp xác lập cơ sở của không gian nhânCho f ∈ L ( Rn, Rm ). Để xác lập cơ sở của Kerf ta triển khai như sau : • Xác định [ f ] B0, C0 với B0, C0 lần lượt là cơ sở chính tắc của Rn, Rm. • Tìm cơ sở của không gian nghiệm của hệ [ f ] B0, C0 X = 0. Cơ sở của khônggian nhân chính là cơ sở của không gian nghiệm của hệ [ f ] B0, C0 X = 0V í dụ 2.10. Cho f ∈ L ( R3 ) xác lập bởi f ( x, y, z ) = ( x + y − z, x + 2 y + 3 z, 2 x + 3 y + 2 z ). Hãy tìm cơ sở của Kerf và tính null ( f ). R3. 1 − 11 1 − 1 d3 → d3 − d21 4 − − − − − − → 0 1 4 1 40 0 05 α x 1 = − x3 = 0 ⇔ x2 = − 4 α + 4×3 = 0x3 = α ∈ RGiải. Gọicủa B0 là cơ sở chính tắc 1 1 − 1 d → d2 − d1 [ f ] B0 = 1 2 3 − − 2 − − − − − → 0 d3 → d3 − 2 d12 3 2T ừ đó ta có hệx 1 + x2x217Cho α = 1 ta có u = ( 5, − 4, 1 ). Vậy cơ sở của Kerf là { u = ( 5, − 4, 1 ) } vànull ( f ) = 1. Phương pháp xác lập cơ sở của không gian ảnhCho f ∈ L ( Rn, Rm ). Để xác lập cơ sở của Imf ta triển khai như sau : • Xác định [ f ] B0, C0 với B0, C0 lần lượt là cơ sở chính tắc của Rn, Rm. • Tìm cơ sở của không gian dòng của ma trận ( [ f ] B0, C0 ) T. Cơ sở của khônggian ảnh chính là cơ sở của không gian dòng của ma trận ( [ f ] B0, C0 ) T. Ví dụ 2.11. Cho f ∈ L ( R3, R2 ) xác lập bởi f ( x, y, z ) = ( x + y + 2 z, 2 x + y − 3 z ). Hãy tìm cơ sở của Imf và tính r ( f ). Giải. Gọi B0, C0 lần lượt là cơ sở chính tắc của R3, R2. 1 1 2 [ f ] B0, C0 =. Suy ra2 1 − 3 1 21 21 2 d → d2 − d1d → d3 − 7 d2 ( [ f ] B0, C0 ) T = 1 1 − − 2 − − − − − → 0 − 1 − − 3 − − − − − → 0 − 1 . d3 → d3 − 2 d12 − 30 − 70 0D o đó cơ sở của Imf là { u1 = ( 1, 2 ), u2 = ( 0, − 1 ) } và r ( f ) = 2. Bài tậpBài 52. Cho toán tử f ∈ L ( R3 ) xác lập bởi f ( x, y, z ) = ( x − y + z, x + 2 y − 2 z, x − 3 y + 3 z ). Hãy tìm cơ sở của không gian ảnh ( Im f ) và không giannhân ( Ker f ) của f. Bài 53. Cho toán tử f ∈ L ( R3 ) xác lập bởi f ( x, y, z ) = ( x + 2 y, 3 y − z, 2 x + z ). Hãy tìm cơ sở của không gian ảnh ( Im f ) và không gian nhân ( Ker f ) của f. Bài 54. Cho B = { ( 1, − 1 ), ( − 2, 3 ) } là cơ sở của R2. a ) Hãy xác lập f ∈ L ( R2 ) sao cho [ f ] B = 1 23 − 1 b ) Hãy tìm cơ sở của không gian ảnh ( Im f ) và không gian nhân ( Ker f ) của fBài 55. Cho B = { ( 1, 1, 1 ), ( 1, 1, 0 ), ( 1, 0, − 1 ) } là cơ sở của R3. 18 a ) Hãy xác lập f ∈ L ( R2 ) sao cho [ f ] B = 1 23 − 1 b ) Hãy tìm cơ sở của không gian ảnh ( Im f ) và không gian nhân ( Ker f ) của fBài 56. Cho cặp cơ sở B = { ( 1, 1, 1 ), ( 1, 1, 0 ), ( 1, 0, − 1 ) } B = { ( 1, − 1 ), ( − 2, 3 ) } ( của R3 ) và C = { ( 2, − 1 ), ( − 3, 2 ) } là cơ sở của R2. ( của R2 ) a ) Hãy xác lập f ∈ L ( R2 ) sao cho [ f ] B, C = 2 1 − 23 − 1 1 b ) Hãy tìm cơ sở của không gian ảnh ( Im f ) và không gian nhân ( Ker f ) của f19
Source: https://vh2.com.vn
Category : Trái Đất

Châu lục hay gọi là châu là một khái niệm của địa chính trị. Nó là tổ hợp lớn về đất đai, trên đó có nhiều quốc gia với các...

Trước đây, khi khoa học chưa thực sự phát triển và các cuộc thám hiểm, khám phá vùng đất mới diễn ra không nhiều thì chúng ta vẫn luôn nghĩ...

Đông Nam Á Địa hình của Đông Nam Á Dưới đây là danh sách các quốc gia Đông Nam Á theo một số tiêu chí. Địa lý, chủ quyền lãnh...
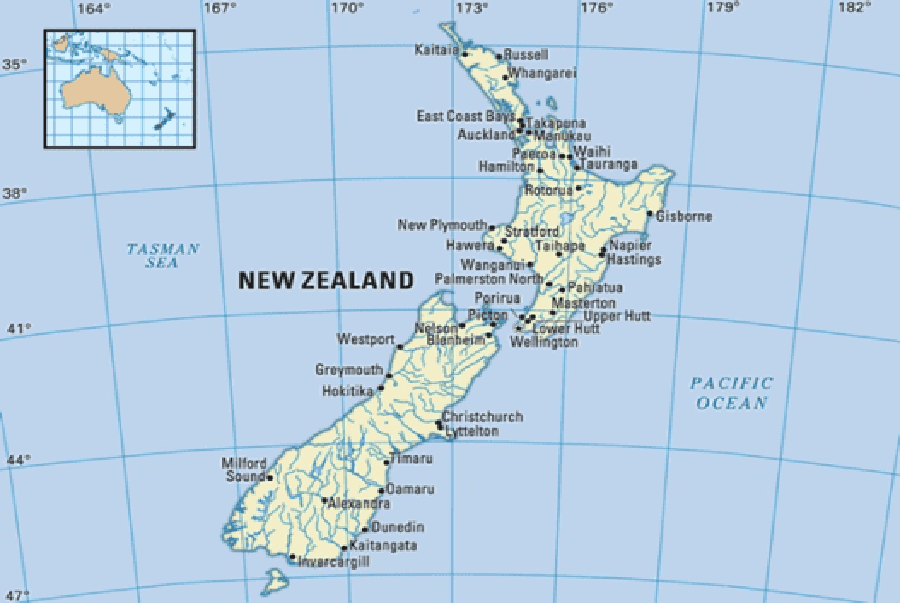
Để hiểu về đất nước New Zealand xinh đẹp, bạn nhất định phải biết New Zealand ở châu nào và vị trí của nước này có gì đặc biệt. Bởi...