Điều tra xu thế sản xuất kinh doanh thương mại ( SXKD ) hàng quý gồm có 6.500 doanh nghiệp ngành công nghiệp chế biến, sản xuất và 6.600 doanh...
Hướng dẫn làm Quadcopter mini | Việt Machine
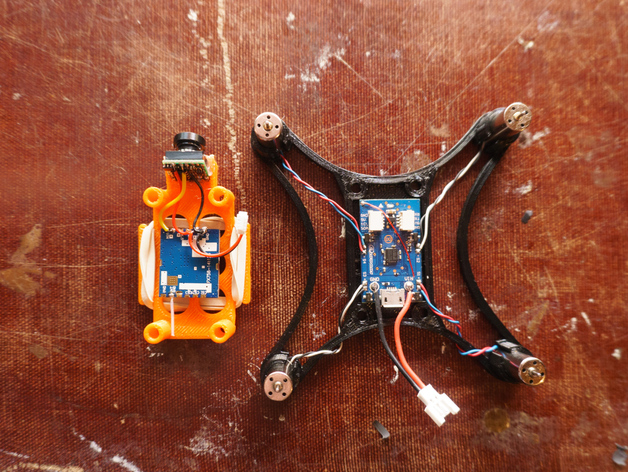
Quadcopter cơ bản là máy bay 4 cánh, thân hình chữ thập.
Về cơ bản, Quacopter có các bộ phận chính sau:
– Bộ điều khiển R/C: Bộ điều khiển này về lý thuyết và khi không có vật cản nó có khả năng điều khiển trong bán kính 1km. Để điều khiển cho Quacopter cần phải có điều khiển 6 kênh hoặc 4 kênh trở lên. Các cần điều khiển gồm có qua trái, qua phải, lên, xuống, xoay trái máy bay, xoay phải máy bay, tự cân bằng…
– Board điều khiển chính: Board này chịu trách nhiệm nhận tín hiệu điều khiển từ Remote, Đọc tín hiệu cảm biến cân bằng trên thân nó để điều khiển bốn đông cơ ở 4 góc cho phù hợp, Cảm biển cân bằng trên Board này rất hữu ích, nó giúp ta điều chỉnh cần điều khiển lúc ban đầu sao cho máy bay sẽ cân bằng.Các board hiện đại người ta còn tích hợp cả GPS trên đó giúp định vị máy bay hay tự động đáp….
– Bộ khung sườn: Bộ khung này được thiết kế sao cho 4 góc là hoàn toàn cân đối cả về khối lượng và kích thước, vị trị bắt ốc để máy bay được cân bằng. Động cơ được đặt ở bốn góc này phải hoạt động đồng bộ. Khi ta lắp ráp khung sườn cần phải đảm bảo tính đối xứng của nó.
– Động cơ và bộ điều xung: Sau khi board điều khiển phát xung điều khiển ra Board, Bộ điều xung sẽ căng cứ vào độ rông xung phát ra mà điều khiển tốc độ động cơ. Động cơ dành cho Quacopter là loại động cơ 1 chiều có tốc độ vòng tua cực lớn, có thể lên đến 750~1000 vòng / phút. Tiêu thụ dòng lên đến 35A. Đây cũng chính là lý do các loại quadcopter chỉ có thể bay trong vòng 10~15 phút vì tiêu thụ công suất ở các động cơ là rất lớn, năng lượng nguồn cũng bị hao hụt nhanh hơn.
– Cánh máy bay: Đây là bộ phận cực kỳ dễ hư hỏng nếu bạn điều khiển không tốt làm cho máy bay bị rơi. Cánh máy bay thường làm bằng nhựa hoặc sợ Carbon. Bạn nên sử dụng loại cánh máy bay sợi carbon vì nó cự kỳ chuẩn trong thiết kế giúp cho máy bay cân bằng tốt và độ cứng rất cao sẽ giúp ít hư hỏng khi máy bay rơi.
Tùy theo kích thước con quadcopter các bạn muốn chế tạo, các bạn có thể lựa chọn những thiết bị phù hợp với bộ khung của mình. Kích thước càng nhỏ thì con quadcopter của bạn sẽ thông dụng hơn, đỡ tốn chi phí hơn, nhìn bắt mắt hơn. Nhưng có một lưu ý về độ sai số của khung và khối lượng của motor sẽ ảnh hưởng đến độ cân bằng của quadcopter, và các bạn phải chọn board điều khiển trung tâm thích hợp với bộ điều khiển của mình.

Sau đây mình xin hướng dẫn các bạn về cách làm một con quadcopter mini:
Linh kiện điện tử gồm có :
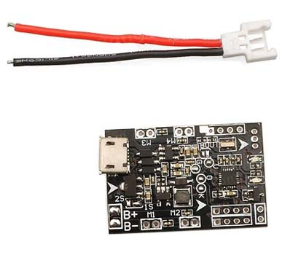
Mạch điều khiển trung tâm, motor 8.5mm, quạt 4 cánh, pin,…
Ở đây mình sử dụng các loại linh kiện như sau:
– Board điều khiển trung tâm: SPRACING F3 EVO Brush Flight Control Board For QX95 QX90 QX80 x 1 cái.
Bạn đang đọc: Hướng dẫn làm Quadcopter mini | Việt Machine
– Cánh quạt: TKP 4045 Propeller Muticopter x 4 cái.

– Motor: Motor 8.5mm x 4 cái.

– Pin: ( tùy loại quadcopter của các bạn ) ở đây mình dùng pin 18650 2000mah.

Khung nhựa các bạn hoàn toàn có thể tìm hiểu thêm :
https://vh2.com.vn/609/bo-part-nhua-3d-khung-quadcopter-mini

Phần linh kiện điện tử các bạn có thể tham khảo:
https://vh2.com.vn/610/tron-bo-linh-kien-dien-tu-dung-cho-quadcopter-mini
Video hướng dẫn :
Trọn bộ file dự án Bất Động Sản :
https://www.thingiverse.com/thing:1221911
Source: https://vh2.com.vn
Category custom BY HOANGLM with new data process: Chế Tạo

CÔNG TY TNHH THƯƠNG MẠI XNK TÀI NGUYÊN TÂY BẮC 5500638311 Bản Púng, Xã Chiềng Khoong, Huyện Sông Mã CÔNG TY TNHH MTV THƯƠNG MẠI VÀ DỊCH VỤ MINH HẠNH...
CÔNG TY TNHH ĐẦU TƯ SẢN XUẤT THƯƠNG MẠI DỊCH VỤ ĐÀO QUANG 5801470398 thôn Phúc Thanh, Xã Phúc Thọ, Huyện Lâm Hà CÔNG TY TNHH PHÚ HỘI LAND 5801469434...
CÔNG TY TNHH ĐẦU TƯ SẢN XUẤT THƯƠNG MẠI DỊCH VỤ ĐÀO QUANG 5801470398 thôn Phúc Thanh, Xã Phúc Thọ, Huyện Lâm Hà CÔNG TY TNHH VẠN TÍN PHÁT .TT...

Sử dụng dây chuyền sản xuất giấy giúp nâng cao chất lượng, hiệu quả và lợi nhuận cho các doanh nghiệp. Để hiểu rõ hơn về hệ thống máy móc...