Simulacrum, từ simulacrum Latin, là một sự bắt chước, giả mạo hoặc hư cấu. Khái niệm này được liên kết với mô phỏng, đó là hành động mô phỏng .Một...
Hướng dẫn lập trình PLC Mitsubishi phát xung điều khiển Servo
HƯỚNG DẪN LẬP TRÌNH PLC MITSUBISHI PHÁT XUNG ĐIỀU KHIỂN SERVO
Giới thiệu về chế độ điều khiển Servo
Drive và Motor Servo được sử dụng khá thông dụng với những chính sách tinh chỉnh và điều khiển ;
– Điều khiển vị trí : quay động cơ với 1 số ít vòng xoay được xác lập trước. Ứng dụng nhiều trong những hành trình dài kéo loại sản phẩm như máy cắt vỏ hộp, máy đóng gói. Động cơ sẽ kéo vỏ hộp đúng theo chiều dài túi được đặt trước .
– Điều khiển tốc độ: duy trì bám sát tốc độ được cài đặt. Ví dụ có thể ứng dụng trong việc đồng bộ tốc độ của dao cắt với tốc độ sản phẩm đưa vào trong dao chặt giấy bao bì carton, máy đóng gói dạng nằm, …
– Điều khiển lực căng : điển hình nổi bật trong những ứng dụng kéo dây, việc duy trì không thay đổi lực căng, momen xoắn đầu trục động cơ sẽ không làm trùng hoặc căng đứt dây .
Trong việc tinh chỉnh và điều khiển vị trí, với drive Servo, drive Step sẽ sử dụng giải pháp tinh chỉnh và điều khiển bằng việc nhận xung tần số cao ở cổng vào I / O .
Sơ đồ đấu nối PLC Mitsubishi phát xung điều khiển Servo
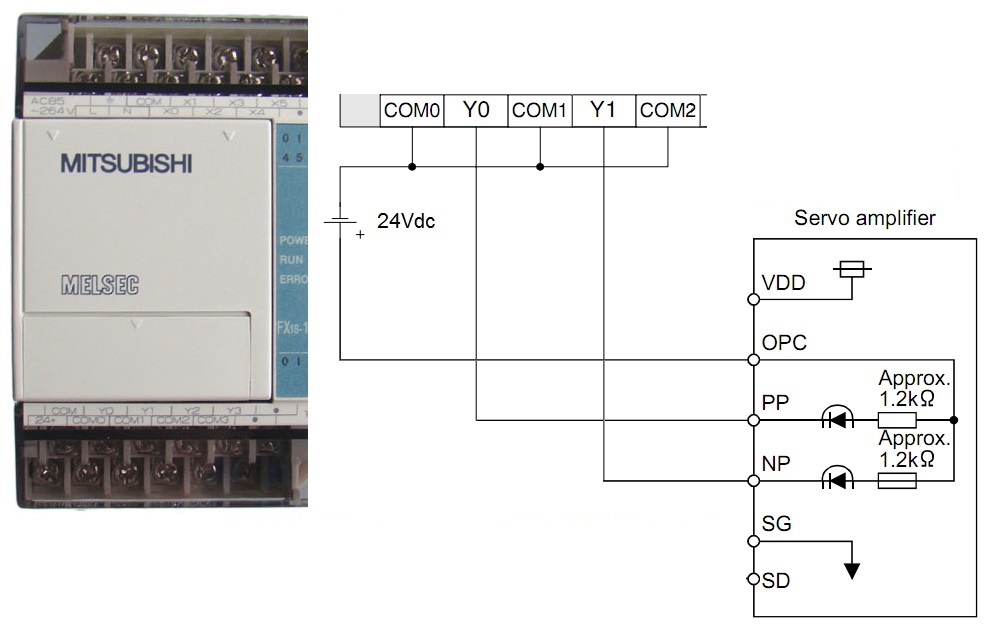
Sơ đồ đấu nối PLC Fx1S-10MT-001 với Servo MR-J2S-A
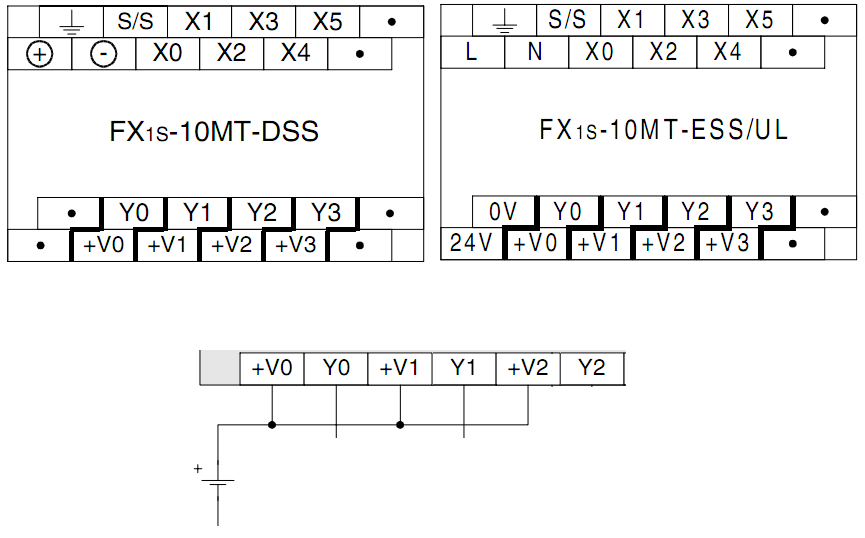
Sơ đồ đấu nối ngõ ra PLC Fx1S-10MT-DSS, Fx1S-10MT-ESS/UL
Lệnh phát xung trong PLC Mitsubishi
Các dòng PLC tương hỗ phát xung vận tốc cao thì điều kiện kèm theo thiết yếu ngõ ra của PLC phải là dạng điện tử – Transistor. Khi đó nếu CPU tương hỗ lệnh, tất cả chúng ta sẽ hoàn toàn có thể dùng một trong những lệnh như sau :
– PLSY : Phát xung vuông với tần số và số xung được đặt trong tham số lệnh .
– PLSR : Phát xung vuông tựa như lệnh PLSY nhưng có thêm tham số hiệu chỉnh việc tăng tần số phát xung và giảm tần số phát xung khi khởi động và kết thúc lệnh phát xung. Việc này tạo sườn dốc khi khởi động và dừng, giúp làm mềm hoạt động hơn lệnh PLSY ở những vận tốc cao .
– DRVI : Phát xung kèm thêm phát lệnh hòn đảo chiều theo giá trị + / – của xung. Lệnh này cũng được cho phép thiết lập chỉ số hiệu chỉnh sườn dốc khi khởi đầu và chuẩn bị sẵn sàng kết thúc lệnh. Mỗi lần phát xung, số xung được tính tương đối theo lệnh .
– DRVA : Tương tự lệnh DRVI, nhưng vị trí khởi đầu được xác lập tuyệt đối. Số xung sẽ lưu lại trong thanh ghi và xác lập tuyệt đối so với điểm bắt đầu .
Lập trình PLC Mitsubishi phát xung tinh chỉnh và điều khiển Servo
Ví dụ : lập trình lệnh PLSY phát xung ra cổng Y000 và lệnh PLSR phát xung ra cổng Y001. Các bước triển khai như sau :
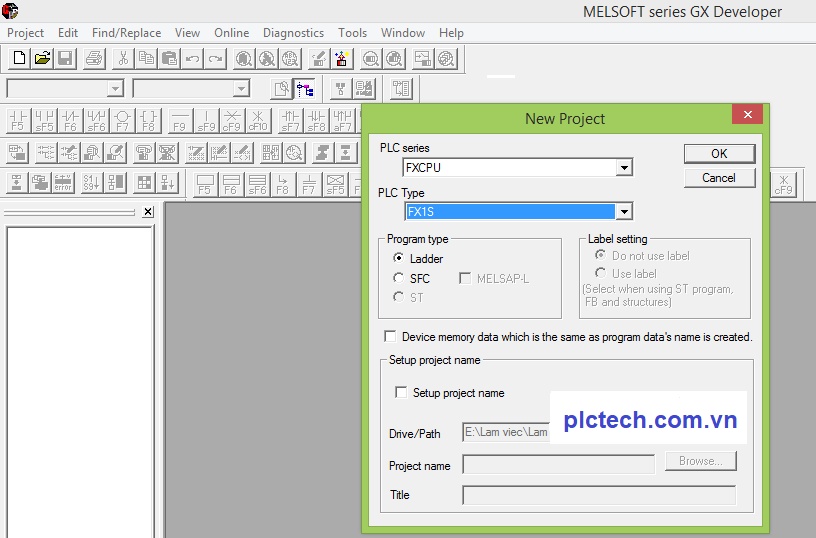
Bước 1: Mở phần mềm lập trình soạn thảo code PLC : GX Developer. Khởi tạo file project mới cho dòng PLC FXCPU loại FX1S.
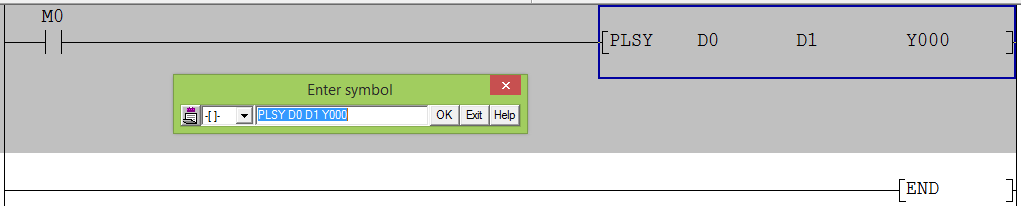
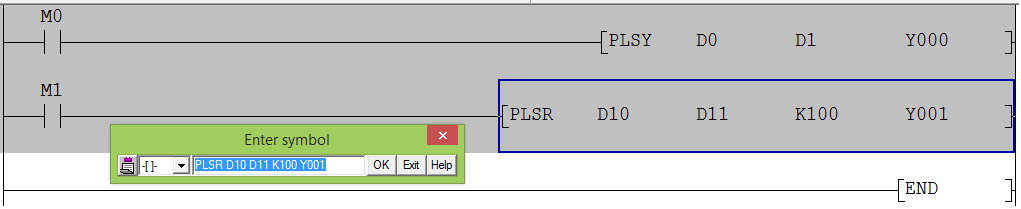
Bước 2: Soạn thảo lệnh phát xung PLSY ra cổng Y0 của PLC
-
- Ý nghĩa của lệnh : PLSY D0 D1 Y000 :
-
- D0 : Tần số xung sẽ phát ra, việc này quyết định tốc độ của Servo.
-
- D1 : Số xung sẽ phát ra khi lệnh PLSY được kích hoạt.
-
- Y000 : là cổng phát xung Y000 được lựa chọn.
Bước 3: Soạn thảo lệnh PLSR ra cổng Y001 của PLC như sau :
-
- Ý nghĩa của lệnh phát xung PLSR D10 D11 K100 Y001:
-
- D10 : Tần số xung sẽ phát ra.
-
- D11 : Số xung sẽ phát ra khi lệnh PLSR được kích hoạt.
-
- K100 : Thời gian tạo quá trình tăng tần số và giảm tần số khi thực hiện lệnh. Tính theo đơn vị ms.
Bước 4: Biên dịch chương trình nạp xuống PLC, Online chương trình để theo dõi, nạp thử tần số 10.000Hz, số xung 25.000 xung xuống PLC và chạy thử lệnh.
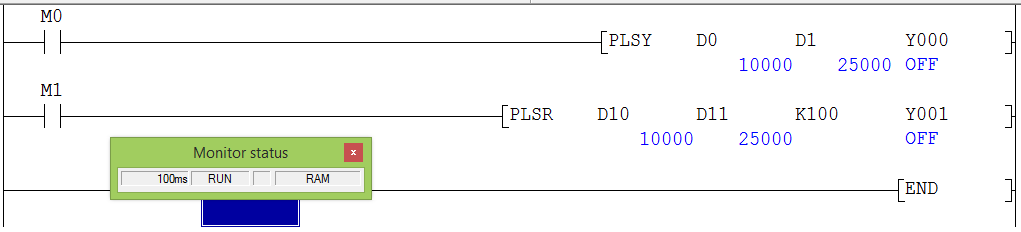
Biên dịch chương trình nạp xuống PLC, Online chương trình để theo dõi, nạp thử tần số 10.000 Hz, số xung 25.000 xung xuống PLC và chạy thử lệnh .
Các tính toán số xung cần chạy theo chiều dài, vị trí thực tế khi điều khiển Servo
– Giả sử tất cả chúng ta vẫn sử dụng MelServo Mitsubishi MR-J2S-70A, với độ phân giải và thông số chia mặc định CMX = 1 / CDV = 1 ( đây là hai tham số setup trong tài liệu hướng dẫn của MR-J2S-__A ), servo sẽ hiểu 1 vòng xoay có 131072 xung .
– Giả sử tiếp theo là mạng lưới hệ thống của tất cả chúng ta, mỗi vòng xoay của servo sẽ làm phần di dời với độ dài 25 cm .
– Như vậy PLC phát ra 131072 xung sẽ làm servo di dời 250 mm .
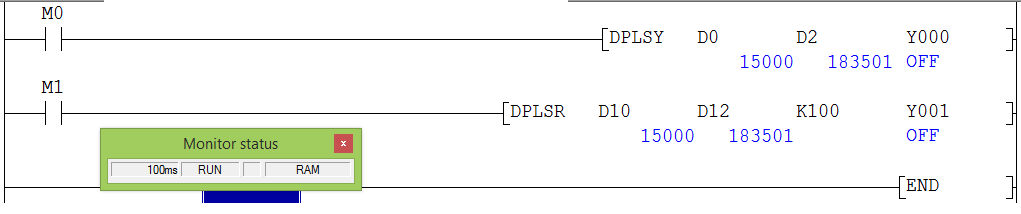
– Vậy giờ nếu muốn Servo chạy đủ chiều dài 350 mm, PLC sẽ phải phát ra số xung là : 350 / 250 * 131072 = 183500.8 xung ~ = 183501 xung .
Sai lệnh 0.2 xung do tất cả chúng ta để thông số mặc định, số xung lẻ. Trong thực tiễn cũng không loại trừ những kính thước lẻ. Việc một vòng xoay có tới 131072 step mà xảy ra xô lệch dưới 1 xung thì khó tránh khỏi. Để loại trừ, tất cả chúng ta sẽ thiết lập nâng cao hơn bằng những giám sát tỷ số truyền, bước vít me, và chọn những thông số kỹ thuật được sản xuất một cách đúng mực .
Ngoài cách tính toán trên, chúng ta có thể sử dụng hai hệ số của Servo là CMX và CDV để hiệu chỉnh trước giá trị 1 xung tương ứng với chiều dài bao nhiêu. Từ đó PLC sẽ phát xung theo tỷ lệ này để tránh sai số khi thực hiện phép chia trong PLC.
Lưu ý:
=> Với lệnh PLSY chúng ta chỉ có thể nạp giá trị tối đa là 16 bit, tương ứng với 32,767. Vậy làm sao để đưa số 183501 xung vào ?
Giải pháp là sử dụng lệnh cho thanh ghi 32 bit, giá trị sẽ được mở rộng thành 2 thanh ghi liêp tiếp, kết quả sẽ cho phép nạp số lên đến 2,147,483,647.
Tính toán tần số phát xung theo tốc độ Servo:
Với giả thiết ở trên, tất cả chúng ta đang điều khiển và tinh chỉnh Drive servo MR-J2S-70A và động cơ servo đi kèm là HC-KFS73 hoặc HC-MFS73 có hiệu suất 750W, vận tốc 3000 vòng / phút .
Tỷ lệ xung mặc định là 131072 xung / vòng xoay .
=> Cần phát xung với tần số bao nhiêu để Melservo MR-J2S quay đủ 3000 vòng / phút với thông số xung mặt định trên:
– 1 vòng xoay có 131072 xung .
– 1 phút – 60 giây động cơ servo chạy 3000 vòng => 1 giây chạy 50 vòng
– 1 giây sẽ chạy được : 50 x 131072 = 6,553,600 xung .
– Vậy tần số để đạt được vận tốc 3000 vòng phút là : 6,535,600 Hz .
=> Đây là một tần số quá cao so với PLC. Thông thường những ứng dụng sẽ không chạy hết năng lực của servo nên vận tốc sẽ thấp hơn. Ngoài ra tất cả chúng ta hiệu chỉnh tỷ suất CMX / CDV để chia lại số xung / vòng xoay .
– Giả sử tất cả chúng ta đưa về 10000 xung / vòng xoay .
– Lúc này để đạt được 3000 vòng phút, tần số phát xung chỉ còn 500 kHz. Đây cũng là một tần số cao với những loại PLC thường thì. Nhưng với những PLC chuyên được dùng thì trọn vẹn đạt được
– Với PLC Fx1S-10MT, tần số tối đa vào tầm 100 kHz => Tốc độ tối đa với thông số 10000 xung / vòng xoay sẽ là : 600 vòng / phút .
Trên đâu là hướng dẫn cơ bản nhất về lập trình PLC Mitsubishi phát xung tinh chỉnh và điều khiển Servo. Bài viết dựa trên kinh nghiệm tay nghề và có sưu tập tài liệu nên không tránh khỏi thiếu sót. Mọi đong góp quan điểm, những bạn vui vẻ để lại phản hồi cho chúng tôi .
Xin cảm ơn .
Nếu bạn đang có nhu cầu tìm hiểu về Lập trình PLC Mitsubishi phục vụ cho học tập hay công việc, bạn có thể tham khảo khóa học Lập trình PLC từ cơ bản tới nâng cao của chúng tôi. Click để biết thêm thông tin chi tiết khóa học tại đây:
· Đào tạo PLC Mitsubishi
· Lập trình điều khiển động cơ Servo
Mọi tư vấn về Tự động hóa, vui mừng liên hệ với chúng tôi :
TRUNG TÂM TỰ ĐỘNG HÓA CÔNG NGHIỆP PLCTECH
TP.HN : Số 11 Ngõ 2E Dịch Vọng – CG cầu giấy
Hồ Chí Minh : 97 Đường Số 3 – Hiệp Bình Phước – TP. Quận Thủ Đức
SĐT/Zalo: 0984 957 127
Website : https://vh2.com.vn/
Fanpage : https://www.facebook.com/PLCTechHN/
Source: https://vh2.com.vn
Category : Tin Học

Khởi động sao tam giác là một trong số những phương pháp để khởi động động cơ đơn giản, hiệu quả và tiết kiệm chi phí. Vậy Khởi động sao...
Đồ Án 2: Thiết kế mạch Buck Converter DC-DC Bạn đang xem bản rút gọn của tài liệu. Xem và tải ngay bản đầy đủ của tài liệu tại đây...
Nguyên tắc hoạt động máy phát điện xoay chiềuDựa trên hiện tượng cảm ứng điện từ: Khi từ thông qua một vòng dây biến thiên điều hòa, trong vòng dây...
HDSD Led matrix Trong Proteus Và Cách Quét LED SD 8051 ( 8 x 64 ) Ngày 03/08/2010 20:19:50 / Lượt xem: 27279 / Người đăng: biendt / Nguồn: [email protected]...